【如何高效地调整PID参数?】
如何高效地调整PID参数?

工业自动化过程控制中涉及的PID参数整定,是控制系统调试阶段不可缺少的环节。PID参数整定通过看曲线、调参数的原则将系统调至最佳状态。

想要高效快速的整定好参数,要有经验同时还熟悉它的使用。PID参数整定中有比例度控制单元P、积分控制单元I微分控制单元D三部分组成。主要是不断的调整这三个参数,使所需要控制的被控变量维持一个动态平衡。
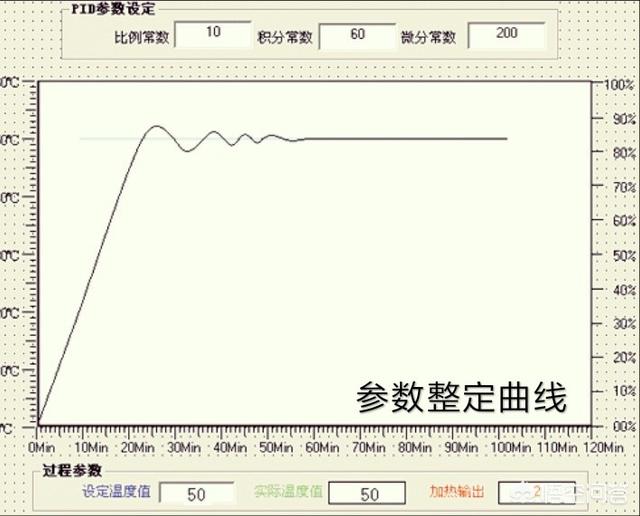
PID参数整定有三种整定方法,分别是经验凑式法、衰减曲线法和临界比例度法。后面两种一般在教学方面做上机实验用的比较多,工业自动化中用的最多的参数整定方法,经验凑式法。被控变量液位的控制比例度一般在20-80%,一般不需要积分微分的介入。被控变量流量和压力控制的比例度分别为40-100%、30-70%,积分时间分别为0.1-1s、0.4-3s。不需要微分的介入。被控变量温度的控制比例度20-60、积分时间3-10s、微分控制0.5-3s。对被控变量参数整定过程一定要看曲线,调参数,将被控变量曲线调整到有两个明显的波峰或者波谷(4:1定值系统)或者将被控变量曲线调到有一个明显的波峰或者波谷(10:1随动系统)。

我来说说数字式PID参数调整。之所以强调数字式,是因为数字式PID的P、I、D的系数是独立的,且直接给的是系数,而不是时间常数(传统PID的P参数统管PID,I参数D参数是按时间常数给)。对于数字式,免不了ADC、DAC。这里给出个人经验,目标值、响应值(也是反馈值)的最大值通过ADC后对应到8V,DAC的满量程输出10V对应执行机构的最大输入(比如伺服阀的最大输入电流)。这样,一开始反馈为0时,如果P参数为1,输出就是80%。好了,下面说说PID参数。I参数,D参数先设为0,P参数设一个小值,比如0.1,目标值设置为50%或更小,对应4%的最大输出,一般系统不会太大动作,如果谨慎,也可更小点,看看系统是否稳定(如果不稳定,可能是接成正反馈了),偏差有多大,跟随的快不快。一般来说,此时跟随比较慢,稳态误差比较大。逐渐提高P参数,跟随变好,稳态误差变小。如果跟随速度、稳态误差满足要求,再设置其他的目标值(包括100%目标值)运行,如果都满意,到此为止。如果稳态误差还偏大,目标值设为50%以下,设置I参数,从0.0001开始,逐渐增加,直到稳态误差减小到满意。如果跟随速度不满意,设置D参数,也是从0.00001开始,逐步增加,直到跟随比较满意。标准型PID的D不具备高频衰减,往往带来噪声放大,最好是通过示波器或者控制器的显示器观察PID的输出,噪声太大了就不能再增大D参数了。PID参数越大,跟随越好、稳态误差也越小,但同时,出现自激的可能性也越大,所以,调整到满意后,参数最好再酌情减小一点。一些系统一旦出现自激损失太大,所以要兼顾指标(跟随性、稳态误差)和稳定性。
转载请注明:徐自远的乱七八糟小站 » 【如何高效地调整PID参数?】



