★★★★★★★★注意:6050有上电3秒自校准(需写程序)★★★★★★★
注意事项(需要写程序自校准,考虑考虑)
(1)模块上电自校正,需保持3秒以上静止状态,建议不要用手拿着模块;
(2)角度欧拉角由于万向锁问题,横滚,俯仰在90度时候会有相互影响;
(3)右边焊点引脚接地,重启后模块进入 IIC 模式,客户可自行操作传感 器,模块 MCU 不对传感器进行任何操作;
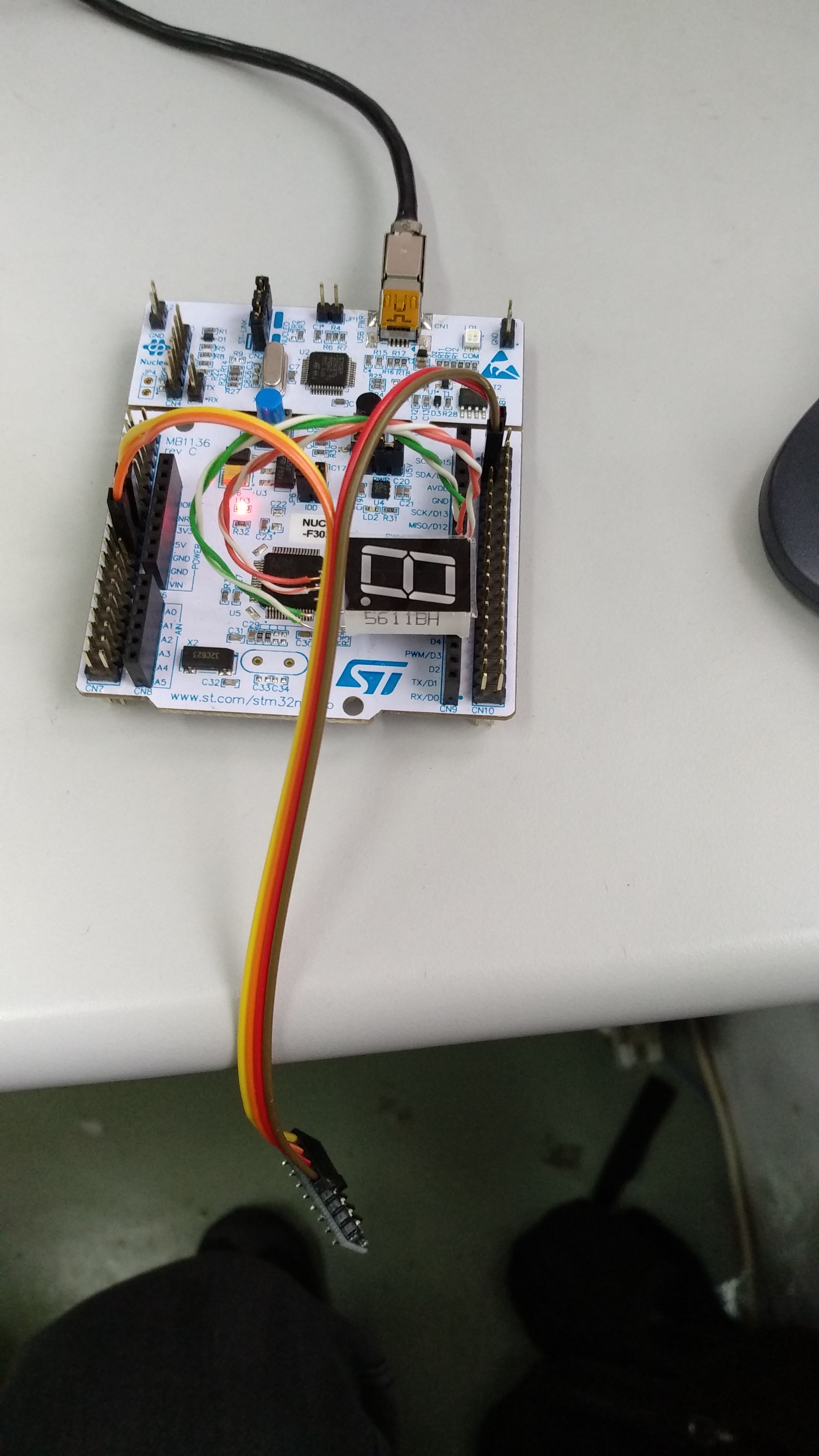
接到一个项目需要做角度计量仪的,准备用九轴来输出角度信息。应该会方便一点。
MPU6050:
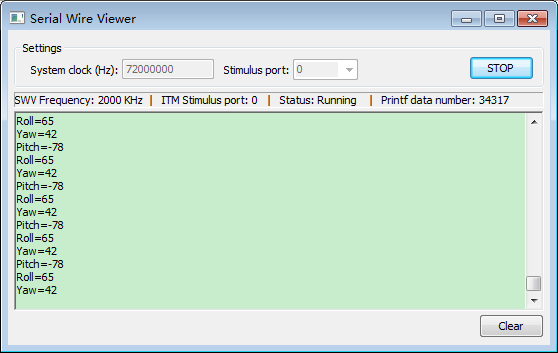
SCL–>PB8
SDA–>PB9
ADO–>GND
参考论坛上的这篇文章把6050输出姿态调通了。非常感谢。
http://www.stmcu.org/module/forum/thread-599730-1-1.html
不过源程序中有一个错误,在I2C read中有一个 == 写成了=。其他还有若干错误已在程序中改正。
在调试的时候碰到一个问题,使用sys作为时钟源的时候,程序总死在
HAL_DELAY()延时程序中,后来把timebase 源改为TIM7就好了,不知道为什么。。。。。★手动标记疑问★
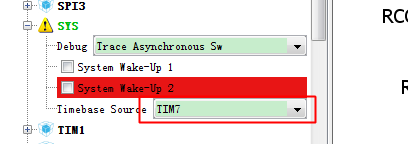
可能是F303的CUBEMX库的bug吧。不准备细究了。
★对了,还有一个傻瓜问题,就是需要把模拟IIC的管脚配置为OD。之前老输出不了就是因为这个缘故。
输出了欧拉角后,利用翻滚角作为角度测量仪的信号输出,其问题是-180~+180°输出的问题,当前角度应该通过换算,最后输出+5v~-5V电压,且极性需要可变。准备利用DA+运放来做。
打个标记科普一下欧拉角知识:

pitch(倾斜角)y轴旋转(对应模块)
yaw(偏航角)z轴旋转(对应模块)
roll(翻滚角)x轴旋转(对应模块)
关于旋转永远是做游戏的难点和混乱点。我们知道表示一个旋转有多种方式,简单的欧拉角,复杂点的四元数,再复杂点的矩阵。之前接触unity可以用四元数和欧拉角两种方式表示旋转,最近一直研究虚幻引擎,目前只看到了欧拉角这一种旋转方式。
欧拉角是表达旋转的最简单的一种方式,形式上它是一个三维向量,其值分别代表物体绕坐标系三个轴(x,y,z轴)的旋转角度。这样的话,很容易想到,同样的一个三维向量,代表了绕x,y,z的旋转值,先进行那个旋转是否对结果有影响呢?显然是有影响的,可以拿着你的手机试一下,不同的旋转顺序会代表不同的旋转结果。所以,一般引擎都会规定自己的旋转顺序。
下面三张动图形象的表示了欧拉角的旋转方式。第一张是绕x轴旋转pitch,第二张绕y轴旋转yaw,第三张是绕z轴旋转roll。

pitch(倾斜角)
yaw(偏航角)
roll(翻滚角)★本项目应该采用翻滚角ROLL,所以应该保持6050的水平安装。
注意:在这边需要注意的是经过测试,将6050垂直90安装后,ROLL会测量不准,而且垂直90后倾角应该取yaw偏航角而不是翻滚角,但是6050偏航角会随着时间漂移,这就比较麻烦了,所以正式制作电路板时准备做一个90°的转接板,将6050插焊在PCB主板上。
绕三个轴的旋转值pitch,yaw,roll来自航空界的叫法,翻译为俯仰角,偏航角,翻滚角,非常形象。它们不一定如上所述,一定分别代表绕x,y,z的旋转值。
从英文意思出发,roll:是卷;滚动,转动;辗的意思;
yaw是(火箭、飞机、宇宙飞船等)偏航的意思;
pitch是倾斜;投掷;搭帐篷;坠落的意思;
所以,roll的意思是翻滚,就是绕着机身所在的那个轴。yaw是偏航的意思,偏航就是绕着重力方向为轴。pitch倾斜、坠落的意思,坠落就是以翅膀所在的直线为轴发生旋转。
另外值得注意的是,pitch值是不能超过90度,这里牵扯到了万向锁的知识,不再多说,网上很多讨论。
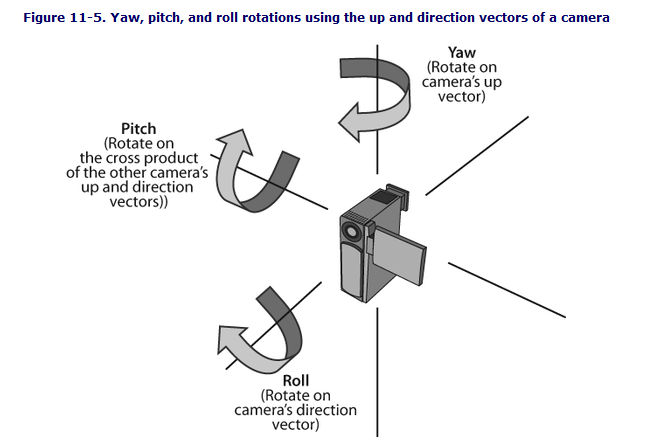
下面这张图是以摄像机的角度来阐述欧拉角的,可以加深理解。可以看到,pitch,yaw,roll在这里并不是常见的代表绕x,y,z的旋转值。
直接计算出roll角度之后就可以使用了。这边还需要注意的是,需要对翻滚角进行校零。
|
1 |
Roll = atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)* 57.3; // roll |
在3D图形学中,最常用的旋转表示方法便是四元数和欧拉角,比起矩阵来具有节省存储空间和方便插值的优点。本文主要归纳了两种表达方式的转换,计算公式采用3D笛卡尔坐标系:
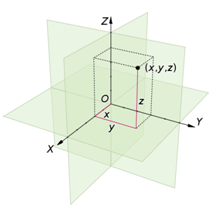
图1 3D Cartesian coordinate System (from wikipedia)
定义 分别为绕Z轴、Y轴、X轴的旋转角度,如果用Tait-Bryan angle表示,分别为Yaw、Pitch、Roll。
分别为绕Z轴、Y轴、X轴的旋转角度,如果用Tait-Bryan angle表示,分别为Yaw、Pitch、Roll。
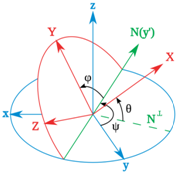
图2 Tait-Bryan angles (from wikipedia)
一、四元数的定义
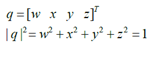
通过旋转轴和绕该轴旋转的角度可以构造一个四元数:

其中 是绕旋转轴旋转的角度,
是绕旋转轴旋转的角度,![]() 为旋转轴在x,y,z方向的分量(由此确定了旋转轴)。
为旋转轴在x,y,z方向的分量(由此确定了旋转轴)。
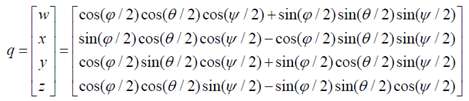
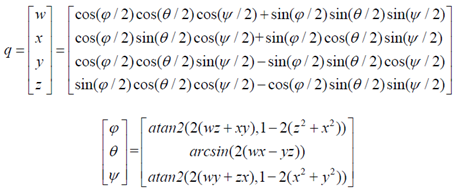
二、欧拉角到四元数的转换
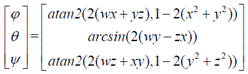
三、四元数到欧拉角的转换
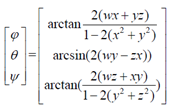
arctan和arcsin的结果是 ,这并不能覆盖所有朝向(对于
,这并不能覆盖所有朝向(对于 角
角 的取值范围已经满足),因此需要用atan2来代替arctan。
的取值范围已经满足),因此需要用atan2来代替arctan。
四、在其他坐标系下使用
在其他坐标系下,需根据坐标轴的定义,调整一下以上公式。如在Direct3D中,笛卡尔坐标系的X轴变为Z轴,Y轴变为X轴,Z轴变为Y轴(无需考虑方向)。
五、示例代码
http://www.cppblog.com/Files/heath/Euler2Quaternion.rar
Demo渲染两个模型,左边使用欧拉角,右边使用四元数,方向键Up、Left、Right旋转模型。
参考文献:
[1] http://en.wikipedia.org/wiki/Conversion_between_quaternions_and_Euler_angles
[2] Ken Shoemake, Animating Rotation with Quaternion Curves, 1985