通过墙壁漫反射的光影,能重建原始画面么?
现在可以了。这不是科幻。
一篇新论文登上了Nature,论文中显示,仅仅用一台普通的数码相机,仅仅凭借墙上模糊不清的光影,就能还原最初的画面。
先来考考大家。下面这个漫反射光影,你能看出什么来?

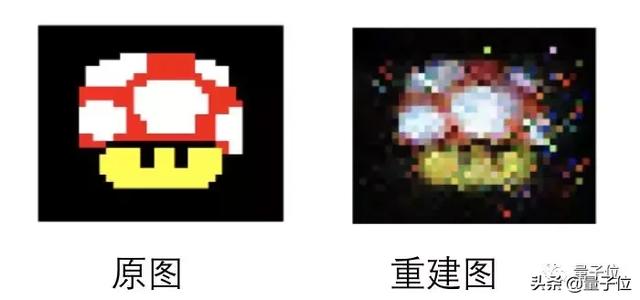
其实这是一个蘑菇。那下面这个是什么?

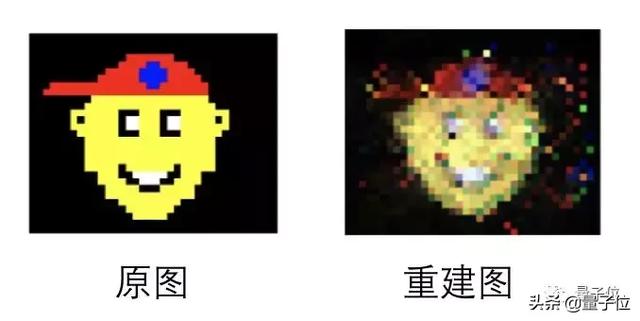
很相似是不是?但这是一张人脸……
你看不出来,但是厉害的算法,真的能凭借这种漫反射,还原逼真的原始画面。无图无真相。下面就是三个重建的实例。
首先放墙上的漫反射光影。
然后是算法重建的图像。
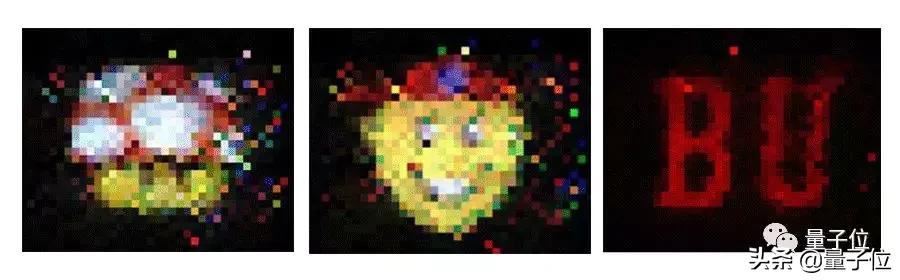
震不震惊!这个效果,简直就是把一面墙,变成了一面镜子!
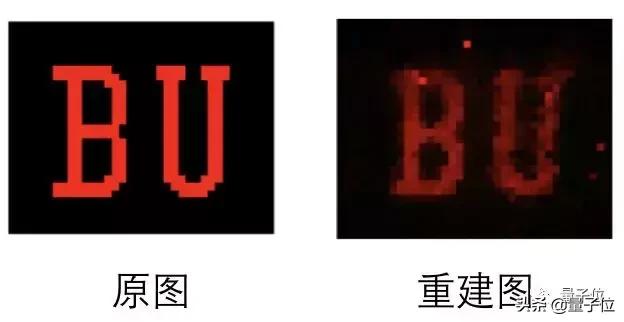
不信?再来对比一下原图。
无论是红黑两色组成的英文字母传递的暗号:
还是超级马里奥里熟悉的蘑菇:
甚至神似辛普森一家中角色的戴红色棒球帽的复杂头像,这个算法都能够通过一面墙一五一十还原出来:
这个AI算法无需借助昂贵的拍摄器材就能还原屏幕,甚至你在自己家都可以把实验模拟操作模拟出来。
研究人员在一间普通的房间的一端放置了一块屏幕,屏幕上显示图案,面向对面的墙壁。
这块屏幕旁边有一套普通的数码摄像机,同样面向对面的墙壁,不过摄像机与屏幕间隔了一块挡板,摄像机根本没有机会直接拍摄到屏幕上的画面。

研究人员采用了一台400万像素的数码相机完成这个实验,售价约为1400美元(约人民币9500元),研究人员预计比此前用脉冲激光相机探物便宜了至少30倍。
而这台数码摄像机要做的,就是通过拍摄屏幕发射到对面墙壁的光,还原屏幕上的图像。
实验难度还在加大:研究人员还在房间中间随手放置了一个不明位置的遮挡物体,可以是一块不发光的板子,也可以是随手拽过来的一把椅子,阻挡一部分光线到达墙壁。

在整个拍摄过程中,数码相机能捕捉到的只有墙上斑驳的光影。
在这项研究公布之前,这种想法被视为不可能的存在:普通摄像机、一块普通屏幕,一把随意搬过来的椅子加一面墙,如何还原屏幕上五彩斑斓的未知图案,甚至是动图?
甚至连专业物理学家都不看好。
荷兰乌得勒支大学的光学物理学家Allard Mosk曾表示:“人们认为,在没有任何先进仪器的情况下,只利用墙面上漫反射的光重建图像几乎是不可能的。”
没想到,这群波士顿大学的研究人员做到了。
让墙变成镜子
先让我们来复习一下初中物理知识:
物体对光线的反射分为镜面反射和漫反射两种。镜子能让我们看清物体,是因为镜子表面光滑,能把光线按照某个固定方向反射回去。
但墙面是粗糙的,当屏幕上的光投射到上面时,光线会往各个方向反射,我们称之为“漫反射”。

在常识中,我们是无法通过漫反射的混乱光线恢复物体原貌的。之前也有些技术能恢复图像,但对光线的要求极高,比如激光,成本也高得多。而波士顿大学的Vivek K Goyal小组这项只需要研究普通照相机。
Mirror mirror on the wall!只要算法够强,墙面也能变成镜子!
与镜面成像不同的是,在镜子前个东西加与阻挡视线,而在屏幕和墙面之间插入障碍物,反而会降低我们还原图像的难度。
这看似违反常识,其实是有道理的。想象一下小时候做过的“小孔成像”实验,当光线只能通过一个小孔时,屏幕的光就会在墙面上形成清晰图像。
显示器和墙面之间的障碍物减少了杂散光线,让入射光线更少,就能让成像稍微清晰一点。
当然,Goyal的研究没有把入射光线限制在太小的范围里,而是用算法从墙上的阴影中恢复屏幕原来的样子。虽然现在只能恢复任天堂8位机那种简单的图像。
以上只是定性的描述,若要精确恢复屏幕上的图像,我们需要建立墙面上各点亮度与屏幕亮度的函数关系:

在上面方程中,Pw是墙上的点,x是屏幕上的点,P0是障碍物上的点,nx和nw分别是显示器与墙面的法向量,Pw-x表示的是从点x指向Pw的向量。
- I(Pw)墙上点表示Pw的亮度,可以由相机拍摄的图像获得;
- f(x)表示屏幕上点x的亮度,实际代表着显示器上的图像;
- 当P0在Pw和x之间时,V等于0,否则等于1;
- μ表示显示器指向不同角度光照差异;
- b表示背景光对墙面亮度的贡献。
以上方程中,I(Pw)我们可以用相机照片获得,通过以上方程反向推算出f(x)。
如果没有障碍物,V处处等于1,I(Pw)与f(x)的依赖关系太弱,反而不利于恢复图像,这也是在屏幕和墙面之间加入障碍物的原因。
以上方程太复杂,也不利于计算。既然屏幕的光照越强,墙上的点也就越亮,我们可以把上面的积分方程转化为一个线性方程。
y = A(po)f + b
y是墙上各点的亮度,我们选取126×126个点,也就总共15,876个变量的方程组,其中A(P0)代表一个变换矩阵。
其实Goyal小组去年已经做出了相关成果,但当时必须要知道障碍物的形状以及位置,才能恢复图像。
但这次他们把难度又提高了一个档次,仅仅知道障碍物的形状,却不知道位置。
Goyal的方法是,先估计出障碍物的位置,再通过平均位置附近的49组数据反向恢复图像。
再发展下去,他们的算法连障碍物是什么形状都不需要知道,只通过墙上模糊的影子,就能它的样子。
相关研究
通过AI算法分析光影预测直接看不到的物体不仅有这一种方法,早在2010年,MIT Media Lab的研究人员已经有了成果。
和波士顿大学不同,这种方法需要单独购置特殊设备,即一台能够发射出激光的相机。
与耳朵接收回音类似,这种方法通过手机激光照在物体表面的反射路径,算法预测角落中直接看不到的物体。

2017年,MIT计算机科学和人工智能实验室(CSAIL)又开发了一种新算法,这个AI系统可以借助智能手机的摄像头,收集光反射的相关信息,检测隐藏在障碍物后的任何物体,还能实时测量它们的移动速度和行进轨迹。

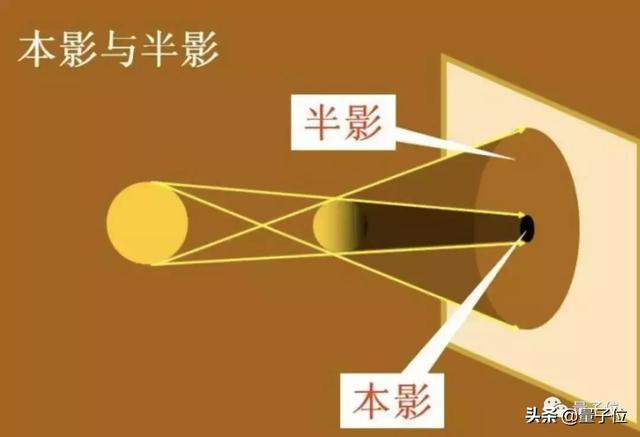
想象一下,你走在一条“L”形的走廊上,拐角的另一边放置了一堆杂物。这些杂物投射在你视线内地面上的少量光线,形成一个模糊的阴影,我们称之为“半影”。
AI系统就利用了智能手机摄像头中半影的视频,将一系列一维图像组合在一起,揭示周围物体的信息。
研究人员将这个“透视眼”系统称为“角落相机”(ConerCameras),研究人员表示,这种方法在室内和室外的效果都还不错。
这种方法也有弊端,如果如果隐藏的场景本身光线暗,系统的识别也会有问题,此外,智能手机的相机像素也影响收集的图像质量,相机里障碍物越远,系统收集的图像质量也越差。
但在Nature最新研究中,这种弊端不会显现,波士顿大学的研究人员表示,从理论上讲,你不仅可以拍摄屏幕,还可以拍摄同一房间内任何灯光昏暗的物体。
传送门
可移步Nature原文继续了解,论文Computational periscopy with an ordinary digital camera:
https://www.nature.com/articles/d41586-019-00267-x
作者:Charles Saunders, John Murray-Bruce & Vivek K Goyal
— 完 —
诚挚招聘
量子位正在招募编辑/记者,工作地点在北京中关村。期待有才气、有热情的同学加入我们!相关细节,请在量子位公众号(QbitAI)对话界面,回复“招聘”两个字。
量子位 QbitAI · 头条号签约作者
只要算法够厉害,白墙能当镜子用:我初中物理白学了|Nature论文http://t.bytedance.com/FebJcK/