使用VTK与Python实现机械臂三维模型可视化
三维可视化系统的建立依赖于三维图形平台, 如 OpenGL、VTK、OGRE、OSG等, 传统的方法多采用OpenGL进行底层编程,即对其特有的函数进行定量操作, 需要开发人员熟悉相关函数, 从而造成了开发难度大、 周期长等问题。VTK、 ORGE、OSG等平台使用封装更好的函数简化了开发过程。下面将使用Python与VTK进行机器人上位机监控界面的快速原型开发。
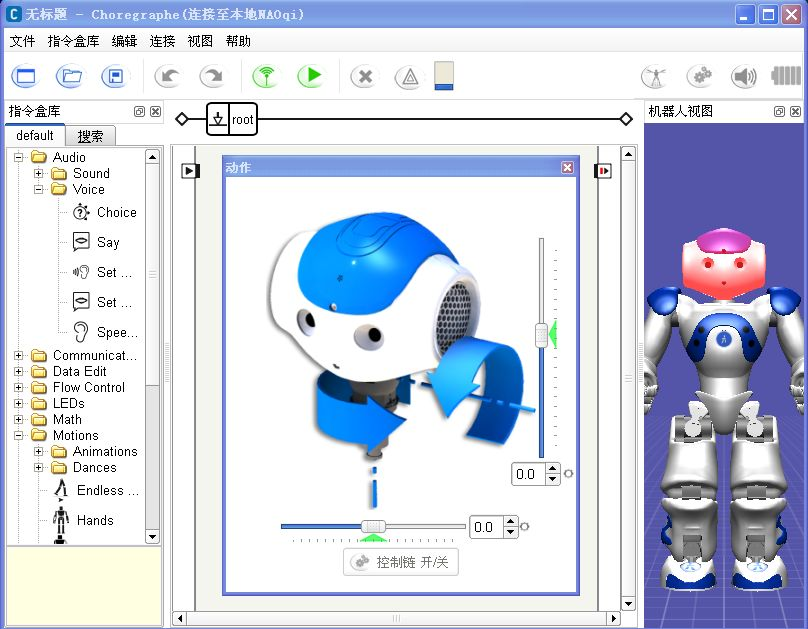
完整的上位机程序需要有三维显示模块、机器人信息监测模块(位置/角度/速度/电量/温度/错误信息…)、通信模块(串口/USB/WIFI/蓝牙…)、控制模块等功能模块。三维显示模块主要用于实时显示机器人的姿态(或位置)信息。比如机器人上肢手臂抬起,程序界面中的虚拟机器人也会同时进行同样的动作。三维显示模块也可以用于对机器人进行控制,实现良好的人机交互。比如在三维图像界面中可以点击拾取机器人某一关节,拖拽部件(肢体)控制真实的机器人完成同样的运动。Aldebaran Robotics的图形化编程软件Choregraphe可以完成上述的一些功能对NAO机器人进行控制。
对于简单的模型可以自己编写函数进行创建,但这种方法做出来的模型过于简单不够逼真。因此可以先在SolidWorks、Blender、3DMax、Maya、Rhino等三维设计软件中建立好模型,然后导出为通用的三维文件格式,再使用VTK将其读入并进行渲染。
在SolidWorks等三维设计软件中设计好机器人的大臂(upperarm)和小臂(forearm),然后创建装配体如下图所示。在将装配体导出为STL文件前需要注意几点:
1. 当从外界读入STL类型的模型时,其会按照它内部的坐标位置进行显示,因此它的位置和大小是确定的。为了以后的定位以及移动、旋转等操作的方便,需要先在SolidWorks中创建一个坐标系。如下图所示,坐标系建立在大臂关节中心点。
2. 如果将装配体整体输出为一个STL文件,则导入VTK后无法控制零部件进行相对运动。因此,需要将装配体各可动部件分别导出。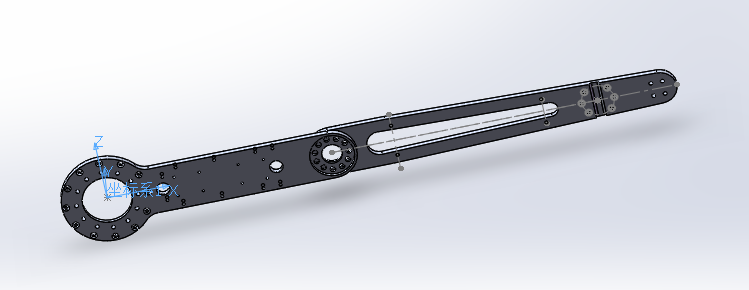
在SolidWorks的另存为STL对话框中,点开输出选项卡,如下图所示。注意之前提到的几点:如果勾选“在单一文件中保存装配体的所有零部件”则会将整个装配体导出为一个STL文件,否则就是分别命名的两个STL文件;输出坐标系下拉列表中选择之前创建的坐标系1,并勾选“不要转换STL输出数据到正的坐标空间”。

下面的Python代码简单实现了一个2自由度机械臂的三维仿真,可以拖动滑块或按键盘上的方向键控制肩关节或肘关节运动。当然程序还存在一些问题有待完善…
 View Code
View Code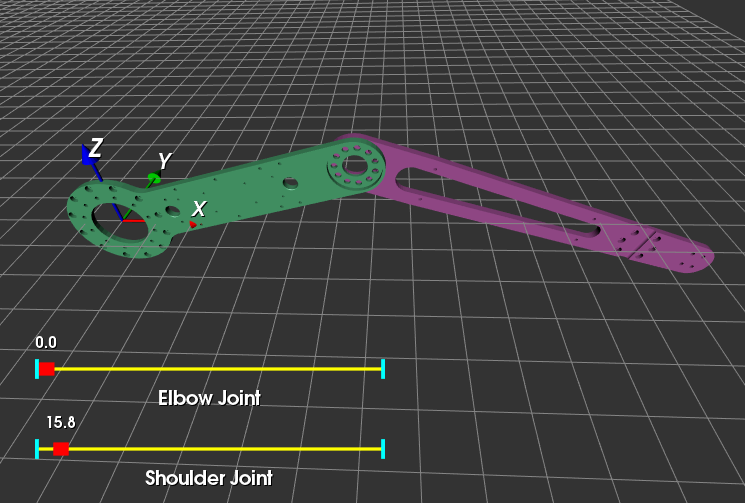
下面是使用MFC搭建的机器人上位机监控平台,可以实现上述的一些基本功能。这个GIF动画使用开源软件ScreenToGif生成,非常好用!

我分享了【使用VTK与Python实现机械臂三维模型可视化 – 冬木远景 – 博客园】, 快来看吧!@小米浏览器 | https://www.cnblogs.com/21207-iHome/p/6430549.html