带你一起制作平衡车(DIY平衡车教程),二轮自平衡
从事IT行业这么多年,养成了喜欢研究的习惯,文章的目的是记录自己学习制作平衡车模型的历程,同时帮助需要的人少走点弯路,喜欢DIY的朋友可以尝试一下。
先了解一下二轮平衡车的控制原理 ,原理是以姿态传感器(陀螺仪、加速度计)来监测车身所处的俯仰状态和状态变化率,通过微控制器计算出适当数据和指令后,驱动电动机产生前进或后退的加速度来达到车体前后平衡的效果。控制过程中就是负反馈机制,有的文章说类似放在指尖上可以移动, 通过眼睛观察木棒的倾斜角度和倾斜趋势(角速度)。通过手指的移动去抵消木棒倾斜的角度和趋势,使得木棒能直立不倒,这是人体的平衡控制,我觉得能加深对平衡原理的理解。我们实现的思路是获取小车目前的状态(倾斜角度值),用这个角度值和小车能够稳定的角度值比较,得出偏差角度值,把这个偏差转换成PWM信号,用PWM驱动电机修正,当偏差角度值等于0的时候,这个时候小车就稳定下来了。平衡车,也叫体感车,最早国外先有的。后来出现在国内,街头上出现好多种形形色色的电动平衡车,有独轮型的,也有两轮型的,还有滑板车型的平衡车基本上全是基于此原理。它的主要组成部分有:传感器模块,mcu控制模块,电机驱动模块,其中传感器模块(主要由加速度计和陀螺仪两个部件组成)。
首先我们看一下电机部分,我用的是带码盘的减速电机,直流减速电机,减速比有1:48,1:120和1:288的多种,减速电机扭矩大。如图

简单用solidworks设计了设计车架,稳定就行,当然网上有很多用亚克力材料制作车身,也不错。
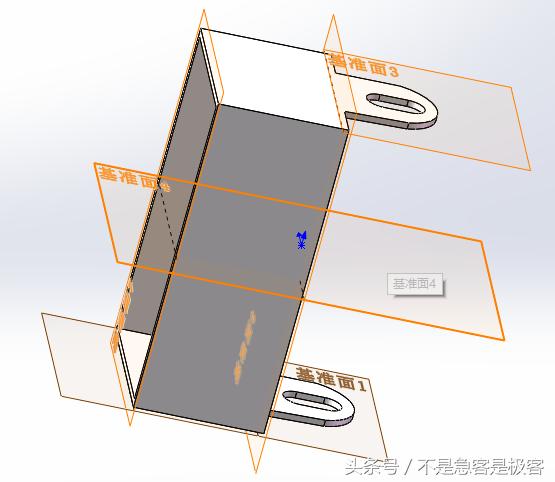
放入打印软件,预览并打印

用了三节18650电池
少不了各种螺丝来固定,网上买个各种型号都有的螺丝盒,方便。

从万能洞洞板上,剪出小块板,没有切割工具,虽然丑但不影响使用。

这里用到了控制器是arduino 的nano小板,体积小。带了usb下载程序方便。为了能够进行前后左右移动控制,加了蓝牙接收器。方便控制。
背面,放了姿态传感器mpu6050,飞线有点乱,不影响使用。
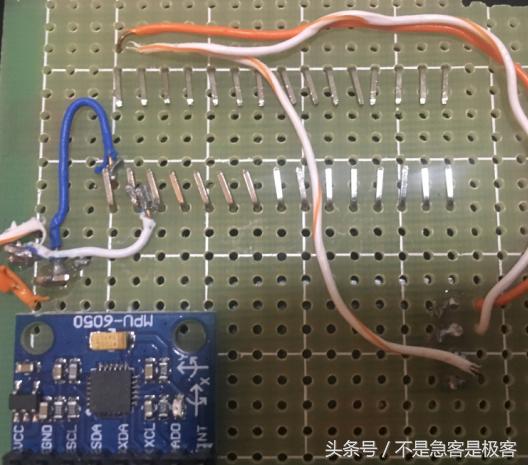
平衡的核心传感器,mpu6050传感器,获取角度的利器,这个6050用在小车上是浪费,因为可以输出3轴加速度和3轴角速度,共六轴的数据, 结合加速度和角速度计算出角度,用在多轴无人机上也是够用了就像前篇我的diy四轴无人机也是用这个传感器,但是用它来做平衡车只需要角度的输出。姿态传感计算代码。直立平衡车的姿态角度时,用到了卡尔曼滤波算法。卡尔曼滤波,我理解,是只需要k-1时刻两参数的协方差估算出k时刻最优解,并算出k时刻协方差进行递归,算出k+1,k+2…时刻的最优解。 它是个快速而智慧的算法。知乎上 很多通俗 的解释,有些高手的回答个人觉得都不错,地址是:
6050 Pcb如图

网上买的车轮模型,就不打印了

装配实物图如下

最后来个平衡图,还不错很稳定:

带你一起制作平衡车(DIY平衡车教程),二轮自平衡http://t.jinritoutiao.js.cn/doPtRy/
转载请注明:徐自远的乱七八糟小站 » 带你一起制作平衡车(DIY平衡车教程),二轮自平衡