一个故事教会你如何整定PID(通俗易懂)
一、PID的故事
小明接到这样一个任务:有一个水缸点漏水(而且漏水的速度还不一定固定不变),要求水面高度维持在某个位置,一旦发现水面高度低于要求位置,就要往水缸里加水。
小明接到任务后就一直守在水缸旁边,时间长就觉得无聊,就跑到房里看小说了,每30分钟来检查一次水面高度。水漏得太快,每次小明来检查时,水都快漏完了,离要求的高度相差很远,小明改为每3分钟来检查一次,结果每次来水都没怎么漏,不需要加水,来得太频繁做的是无用功。几次试验后,确定每10分钟来检查一次。这个检查时间就称为采样周期。
开始小明用瓢加水,水龙头离水缸有十几米的距离,经常要跑好几趟才加够水,于是小明又改为用桶加,一加就是一桶,跑的次数少了,加水的速度也快了,但好几次将缸给加溢出了,不小心弄湿了几次鞋,小明又动脑筋,我不用瓢也不用桶,老子用盆,几次下来,发现刚刚好,不用跑太多次,也不会让水溢出。这个加水工具的大小就称为比例系数
小明又发现水虽然不会加过量溢出了,有时会高过要求位置比较多,还是有打湿鞋的危险。他又想了个办法,在水缸上装一个漏斗,每次加水不直接倒进水缸,而是倒进漏斗让它慢慢加。这样溢出的问题解决了,但加水的速度又慢了,有时还赶不上漏水的速度。于是他试着变换不同大小口径的漏斗来控制加水的速度,最后终于找到了满意的漏斗。漏斗的时间就称为积分时间
小明终于喘了一口,但任务的要求突然严了,水位控制的及时性要求大大提高,一旦水位过低,必须立即将水加到要求位置,而且不能高出太多,否则不给工钱。小明又为难了!于是他又开努脑筋,终于让它想到一个办法,常放一盆备用水在旁边,一发现水位低了,不经过漏斗就是一盆水下去,这样及时性是保证了,但水位有时会高多了。他又在要求水面位置上面一点将水凿一孔,再接一根管子到下面的备用桶里这样多出的水会从上面的孔里漏出来。这个水漏出的快慢就称为微分时间
因此
P比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。当仅有比例控制时系统输出存在稳态误差(Steady-state error)
在积分I控制中,控制器的输出与输入误差信号的积分成正比关系。对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。
在微分控制D中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。
二:PID整定的方法
经验法整定PID参数是老仪表工们几十年经验的积累,到现在仍得到广泛应用的一种PID参数整定方法。此法是根据生产操作经验,再结合调节过程的过渡过程曲线形状,对控制系统的调节器参数进行反复的凑试,最后得到调节器的最佳参数。经验法的整定PID参数口诀说:
参数整定寻最佳,从大到小顺次查。
先是比例后积分,最后再把微分加。
曲线振荡很频繁,比例度盘要放大。
曲线漂浮绕大弯,比例度盘往小扳。
曲线偏离回复慢,积分时间往下降。
曲线波动周期长,积分时间再加长。
理想曲线两个波,调节过程高质量。
“曲线振荡很频繁,比例度盘要放大”说的是比例度过小时,会产生周期较短的激烈振荡,如图1所示。且振荡衰减很慢,严重时至会成为发散振荡。
这时就要调大比例度,使曲线平缓下来。
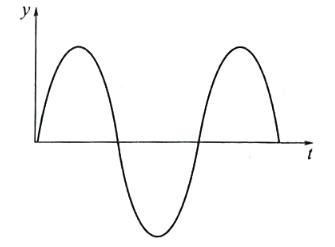
图1 比例度过小时的过渡过程曲线
“曲线漂浮绕大弯,比例度盘往小扳”说的是比例度过大时会使过渡时间过长,使被调参数变化缓慢,即记录曲线偏离给定值幅值较大,时间较长,
这时曲线波动较大且变化无规则,形状像绕大弯式的变化,如图2所示。这时就要减小比例度,使余差尽量小。

图2 比例度过大时的过渡过程曲线
“曲线偏离回复慢,积分时间往下降。曲线波动周期长,积分时间再加长”说的是积分作用的整定方法。当积分时间太长时,
会使曲线非周期地慢慢地回复到给定值,即“曲线偏离回复慢”,如图3所示。则应减少积分时间。当积分时间太短时,会使曲线振荡周期较长,
且衰减很慢,即“曲线波动周期长”,如图4所示。则应加长积分时间。
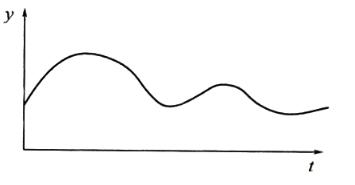
图3 积分时间太长时的过渡过程曲线
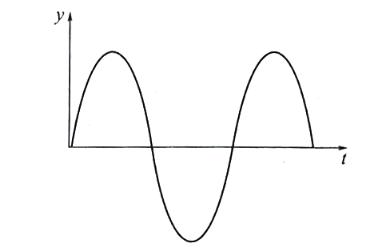
图4 积分时间太长时的过渡过程曲线
调节器的参数按比例积分作用整定好后,如果需启用微分作用时,则“最后再把微分加”。由于微分作用会增强系统的稳定性,故使用微分作用后,
调节器的比例度可以在原来的基础上再增大一些,一般以增大20%为宜。微分作用主要用于滞后和惯性较大的场合,由于微分作用具有超前调节的功能,
当系统有较大滞后或较大惯性的情况下,才应启用微分作用。
以上说的是孤立的调试方法,在实际调试中,由于比例、积分、微分作用的相互影响,所以要互相兼顾才能调试好。
要掌握的是振荡过强则应加大比例度,加大积分时间;恢复过慢则应减小比例度,减小积分时间。加入微分作用后,要把比例度和积分时间在原有的基础上减小一些;
通过调微分时间的凑试,使过渡时间最短,超调量最小。
通俗易懂的解释,有不对的地方还望指正。你们的肯定是小编的荣幸,欢迎转发。
一个故事教会你如何整定PID(通俗易懂)http://t.jinritoutiao.js.cn/dEXaDJ/
转载请注明:徐自远的乱七八糟小站 » 一个故事教会你如何整定PID(通俗易懂)