联系方式:860122112@qq.com
一、动机
MPU9250包括三轴加速度计、三轴陀螺仪和三轴磁力计。因为加速度/磁力计具有高频噪声(需要低通滤波),将加速度/磁力计的信号看成是音频信号,它们的信号会有很多“毛刺“,也就是说它们的瞬时值不够精确,解算出来的姿态会震荡,但长期来看姿态方向是对的。而陀螺仪具有低频噪声(需要高通滤波),即每个时刻的得到的角速度是比较精确的,使用积分就能得到旋转角度(姿态),但是积分会累积误差,因此积分到后面姿态就不对了,也就是漂移现象。 加速度/磁力计和陀螺仪在频域上的特性互补,可以融合这三种传感器的数据,提高精度和系统的动态特性。
下图表示的是把传感器翻转90°一段时间后又翻转回来时,加速度/磁力计、陀螺仪以及融合传感信号,所求得的姿态信息:

然而对于原始的MPU9250来说,在进行姿态融合前需要对传感器进行校正等“预处理”。
二、步骤
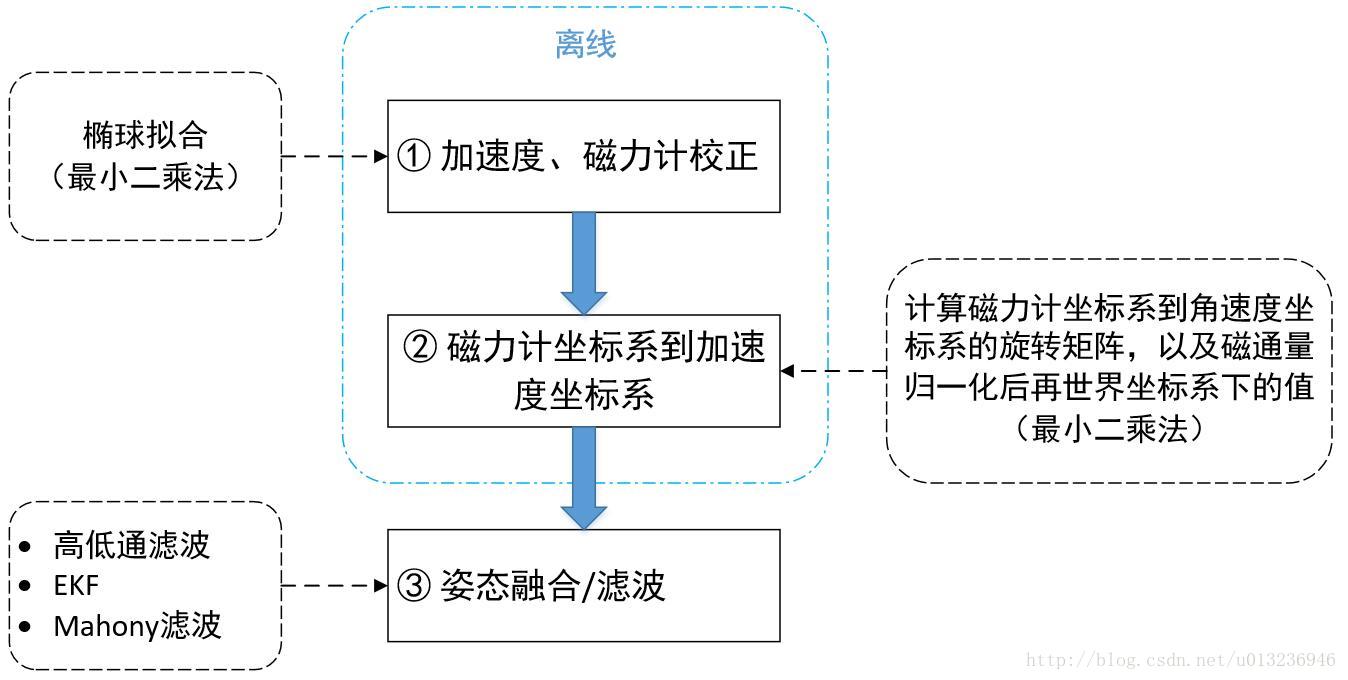
如上图所示,要对MPU9250进行姿态融合/滤波,大体需要三个步骤:1、校正,2、坐标转换,3、滤波。其中前两步需要离线执行。下面详解这三个步骤。
1. 传感器校正
按正常的情况来说,加速度传感器在静止状态(即只受重力作用),重力在各个姿态下,在三维空间中,向量顶点会落在一个球面上。但在IMU中,x,y,z轴的度量单位很大可能不相同,假设各轴之间相互直,各姿态重力点会落在一个椭球面上,椭球的中心也不一定在原点,这其实就是加速度的偏移量。
在磁力计上,由于测量磁场强度,在环境不变的情况下,传感器每个姿态感受磁场强度是相同的,所以不需要静止状态,磁力计测量的x,y,z轴值,在没有偏差且传感器内部x,y,z轴相互垂直的情况下,在三维空间中组成一个圆球面。但是磁力计存在Hard Iron Distortion和Soft Iron Distortion,使得x,y,z轴度量单位不相同,各轴也并非相互垂直,椭球球心也并非[0,0,0]坐标。
总的来说加速度/磁力计校正,需要求出椭球的球心(偏移量)、椭球轴长(各轴单位长度;其实磁力计不需要求,后面会解释。),即椭球拟合。
加速度计校正
- 在离线数据中寻找静止状态下的加速度传感器值,假设静止时的不同姿态共有nn个,则得到数据 accData∈Rn×3accData∈Rn×3;
- accData∈Rn×3accData∈Rn×3 作为样本数据,使用最小二乘法即可求出椭球方程的各个参数,接着根据我师兄博客的方法可以求出椭球的球心(偏移量)和轴长。
磁力计校正
- 提取离线数据的磁力计传感器的值(不需要静止状态),得到样本数据 magData∈Rm×3magData∈Rm×3 , 假设有m组数据;
- magData∈Rm×3magData∈Rm×3 作为样本数据,使用最小二乘法即可求出椭球方程的各个参数,进一步求出球心(偏移量)和轴长(轴长可忽略)。
陀螺仪校正
陀螺仪不存在椭球的问题,因此可以直接从离线数据中找到静止状态下的数据,对数据求均值即可得到偏移量。
2. 磁力计坐标系转换到加速度坐标系
磁力计的基坐标系和加速度的基坐标系(我们以加速度的基坐标系作为世界坐标系)并不一定是一样的,比如加速度的基坐标系x轴指向东,磁力计的指向北。因此,需要将磁力计坐标系转换到加速度计坐标系,才能通过加速度/磁力计解算出正确的姿态。
假设加速度计测量到的重力加速度向量是 ugug,磁力计测量到的磁通量是 vmvm,首先要将 vmvm 从椭球上投射到正球上,投射方程为 rm=Avmrm=Avm。rmrm 是投射后的向量,AA 为 3×33×3 的矩阵。
其次求出 rmrm 转换到加速度计坐标系的旋转矩阵 RR,得到 um=Rrmum=Rrm。而无论任何情况磁通量 umum 和重力加速度 ugug 的夹角固定, 即 ug⋅um=|ug|⋅|um|cosθug⋅um=|ug|⋅|um|cosθ, 因为我们只关心方向不关心大小,所以定值 |ug|⋅|um|cosθ|ug|⋅|um|cosθ 可归一化。综上,有
令 B=RAB=RA 有
椭球转换正球和旋转变换都已经包括在矩阵 BB 里了,再次使用最小二乘法求出 BB 的各个元素即可(对应前面,不必理会磁力计椭球的轴长)。
磁通量在世界坐标系下的x轴分量为0,重力加速度方向固定不变和z轴一致,通过向量点乘可以求出归一化后磁通量在世界坐标系下z轴的分量,再用模长公式求出y轴的分量。最后得到磁通量在世界坐标系下的向量 wmwm,用于滤波时的校正。
3. 姿态融合
在使用各种滤波方法(如高低通滤波,EKF,Mahony)做姿态融合时,可以基于欧拉角、方向余弦和四元数等方法。欧拉角在求解姿态时存在奇点(万向节锁),不能用于全姿态解算;方向余弦可用于全姿态解算但计算量大,不能满足实时性要求;四元数,计算量小,无奇点,满足实时解算。
所以这里使用的是基于四元数姿态融合,滤波方法包括高低通滤波、EKF、Mahony滤波。下面简单介绍这三种算法的大致思想:
高低通滤波
两个方程说明问题
QuaternionQuaternion 是姿态融合后的四元数,gyroSensorQgyroSensorQ 是陀螺仪测量到的角速度所代表的瞬时四元数, Quaternion(t)^Quaternion(t)^ 是使用陀螺仪推算 tt 时刻的估计姿态,accMagQuaternionaccMagQuaternion 是加速度/磁力计解算出的四元数。使用 αα 加权将陀螺仪的估算和加速度/磁力计的解算融合在一起,达到滤波效果。这里 α=0.1α=0.1,一般比较小,因为加速度/磁力计有高频噪声,需要低通滤波,否则会抖动。
EKF
广义卡尔曼滤波,主要有两步:估算、校正。(公式和推导不详述)。
- 估算:和高低通滤波一样,使用陀螺仪估算出 tt 时刻四元数;
- 校正:计算出估算姿态下的重力加速度和磁通量向量,再用加速度/磁力计测量到的重力加速度和磁通量向量按照EKF校正方程进行校正。
Mahony滤波
主要是使用了PI控制器思想(未深入,理解有偏差欢迎指出)。同样也分两步:估算、校正。
- 估算:和前面一样,使用陀螺仪估算出 tt 时刻四元数;
- 校正:计算出估算姿态下的重力加速度和磁通量向量,再用加速度/磁力计测量到的重力加速度和磁通量向量叉乘估算姿态的计算结果,得到的是估算姿态与测量姿态的误差 ee。ee 可以对陀螺仪测量到的角速度进行补偿,使用的是PI控制进行补偿。其中P用于控制加速度计和陀螺仪之间的交叉频率,I用于校正陀螺仪误差。使用补偿后的角速度重新估算出 tt 时刻四元数,此时已达到了滤波效果。
三、实验结果
加速度计椭球拟合
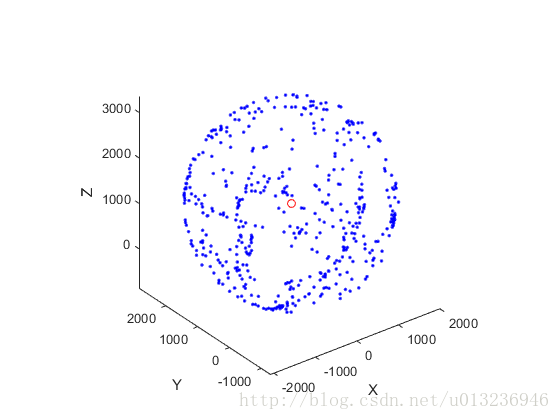
上图更像一个球,但球心明显偏离 [0,0,0][0,0,0]。
磁力计椭球拟合
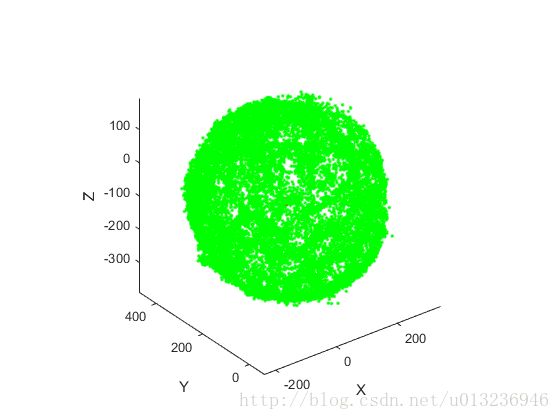
同样球心明显偏离 [0,0,0][0,0,0]。
四元数姿态估计
下图中第一到第四行分别是四元数4个值在使用各种方法估计姿态时的变化情况,第五行是角速度的变化情况。

可以看到,除了Gyro估计的姿态,其他三种滤波算法估算的姿态基本一样。
Matlab实验视频:
前面两个图是加速度计和磁力计的椭球拟合;后一个图是各姿态融合算法对比,可以看到陀螺仪估算的姿态随时间累积误差变大,加速度/磁力计估算的姿态有明显的抖动(高频噪声),其他三种姿态融合算法效果差别不大。
计算时间 Mahony < 高低通 < EKF
手机端姿态融合
属于实验室张欣博士师兄的成果,非本人的工作。
蓝牙传输的数据为100Hz
计算所用的时间 : Mahony < 高低通 < EKF
致谢:以上工作由张欣师兄指导完成,感谢师兄!
转载请注明:徐自远的乱七八糟小站 » IMU姿态融合(MPU9250从校正到滤波步骤)



