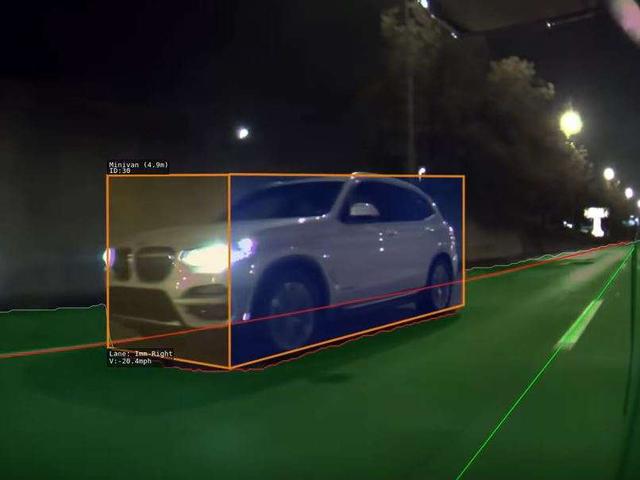
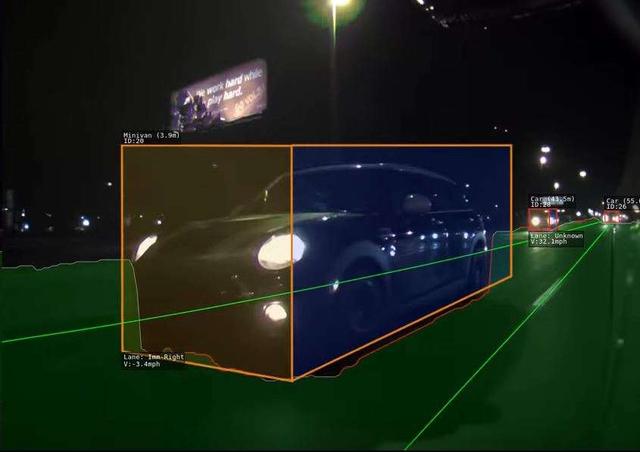
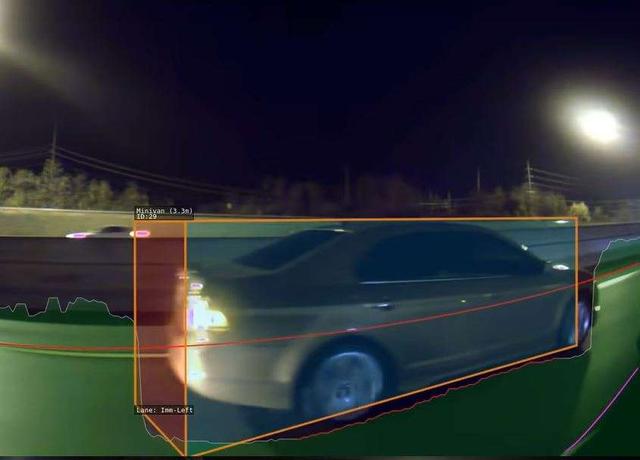
特斯拉Model S是最早给车主带来”自动驾驶”体验的车,虽然经历了Mobileye和特斯拉自研两种自动驾驶方案,但归根结底特斯拉识别周围环境都严重依赖摄像头以及核心算法,马斯克也多次重申,激光雷达的方案太贵,特斯拉的摄像头方案真香。那么,同样是使用摄像头识别周围环境,特斯拉”眼中”的车流都是什么呢?技术人员通过隐藏模式解密数据流发现,原来为了简化计算,特斯拉把看到的所有车辆都识别成方盒子,也就是说,在特斯拉眼里,马路上跑的除了自己之外,都是面包车。

这样的”简化”算法也跟特斯拉的自动驾驶技术路线有着直接关系,比如马斯克一直鄙视用”激光雷达”的高成本方案,他的理由也很充分,人驾驶汽车用两只眼睛看就行了,为什么车载电脑就不能用两颗摄像头看?非得搞昂贵的激光雷达?其实大多数获取的路面信息数据都是对驾驶意义不大的场景绘制。所以马斯克自圆其说……

当然了,对于马斯克的言论,绝大多数搞自动驾驶车的大咖都是反对的,很大程度上是因为摄像头跟人眼根本无法相提并论,因为人眼是跟大脑直连的复杂生物结构,而摄像头只是采集画面的设备而已。特斯拉承诺要在短期内,证明可以通过ACC雷达和双目摄像头就做到完全自动驾驶,这实际上是要向进化论发起挑战,即一块顶级显卡和两个摄像头,可以代替数万年进化的人类的视觉和神经网络系统。大家都在拭目以待看特斯拉怎么搞出来,不过从最近频发的事故报告来看,这条路肯定不是平坦的。
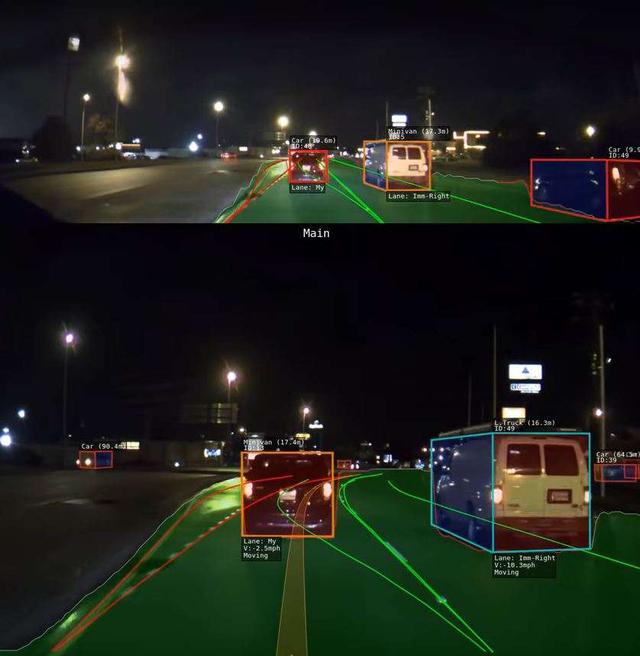
有黑客已经成功破解了特斯拉正在测试中的Autopilot的一些原始数据,得到了特斯拉车载电脑是如何分析摄像头的画面数据的。整个系统会尝试给画面中拍到的车辆自动分类,比如分成小汽车、MPV(面包车)、轻卡、重卡、大巴车,但是电脑毕竟是电脑,它在模糊信息的处理上还是比较弱鸡的,尤其是在不断运动中动态取景,摄像头是很难分辨出精确的车辆形状轮廓的,电脑判断如果力求精确,就无形当中增加了信息处理量和降低识别效率。
其实如果单纯将马路上行驶的其他车辆,都视为障碍物,不要装上去就好这样一个目的的话,那其实对于这辆车究竟是SUV还是MPV意义并不大,所以特斯拉的Autopilot算法在这里有一个简化计算的趋势,就是索性啊,将大部分看得清看不清的车,都统一算成MPV(面包车),所以无论你是法拉利还是劳斯莱斯,在特斯拉Autopilot算法眼中,一律按照五菱宏光处理。
其实这也揭示了一个基本原理,就是大多数激光雷达用海量数据算出了周围汽车的精确形状,对比特斯拉Autopilot的摄像头粗略一拍,实际上在最终算法决策层面,不会形成本质的差异,这也是支撑了马斯克坚决不上激光雷达的理由。
联想起来近期小鹏汽车G3,在车库进行”无人化”自动泊车的时候,撞上了柱子上的消防箱,很多人不知道为何会撞上,实际上小鹏G3的视觉+雷达的方案,跟特斯拉Autopilot算法很类似,一个车位就被识别成一个标准形状的长方形盒子,车辆只要确认自己能够停到盒子里就行了,但是如果有形状怪异的地方,比如向内凸起的消防箱,摄像头看不见或者看不清楚,就会选择性忽略这个细节,导致一些小剐蹭或者事故,这在重效率、轻精度的识别技术路线里,是无解的。

小结:
说句题外话,汽车设计师和汽车厂商花了大量心血和财力,只为设计一个好看有个性的造型,结果在自动驾驶汽车时代,在”智能汽车”眼里,再好的汽车一律都变成了方盒子,不知道汽车设计师们会不会吐血。
特斯拉Autopilot数据解密:马路上所有车,一律按照五菱宏光处理http://t.zijieimg.com/MDYEoQ/