欢迎交流与转载,文章会同步发布在公众号:机器学习算法全栈工程师(Jeemy110)
目录
目录
前言
设计理念
网络结构
训练过程
预测过程
性能评估
TensorFlow上的实现
小结
参考文献
前言
目标检测近年来已经取得了很重要的进展,主流的算法主要分为两个类型:(1)two-stage方法,如R-CNN系算法,其主要思路是先通过启发式方法(selective search)或者CNN网络(RPN)产生一系列稀疏的候选框,然后对这些候选框进行分类与回归,two-stage方法的优势是准确度高;(2)one-stage方法,如Yolo和SSD,其主要思路是均匀地在图片的不同位置进行密集抽样,抽样时可以采用不同尺度和长宽比,然后利用CNN提取特征后直接进行分类与回归,整个过程只需要一步,所以其优势是速度快,但是均匀的密集采样的一个重要缺点是训练比较困难,这主要是因为正样本与负样本(背景)极其不均衡(参见Focal Loss),导致模型准确度稍低。不同算法的性能如图1所示,可以看到两类方法在准确度和速度上的差异。
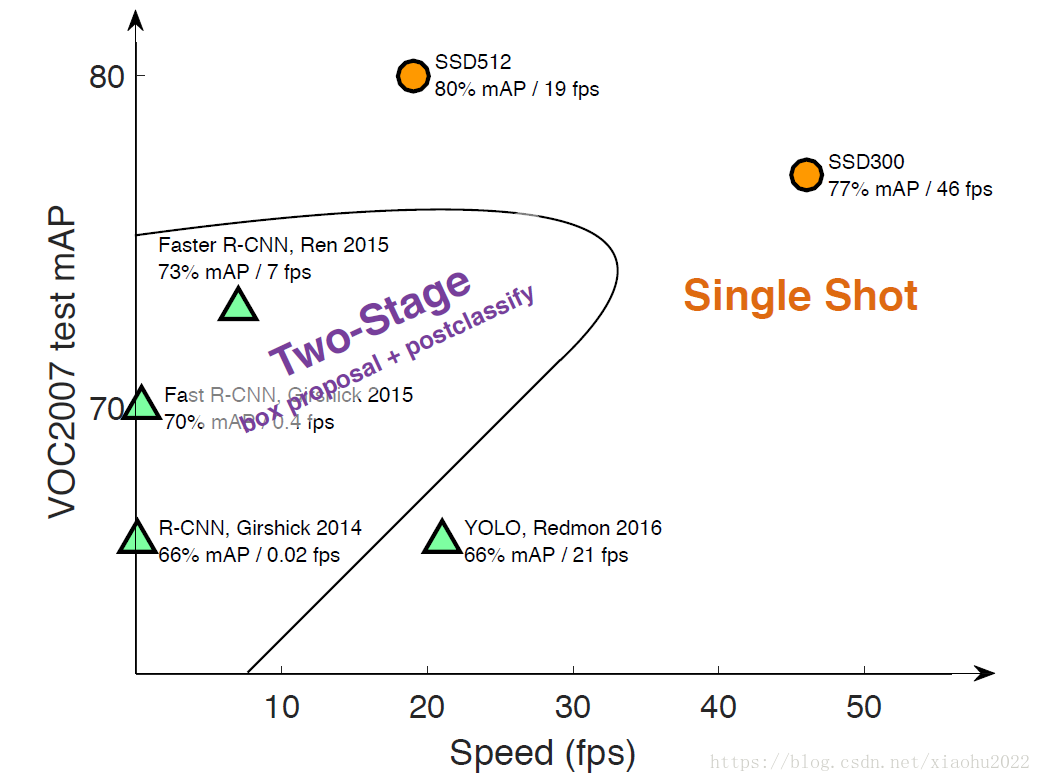
图1 不同检测算法的性能对比
本文讲解的是SSD算法,其英文全名是Single Shot MultiBox Detector,名字取得不错,Single shot指明了SSD算法属于one-stage方法,MultiBox指明了SSD是多框预测。在上一篇文章中我们已经讲了Yolo算法,从图1也可以看到,SSD算法在准确度和速度(除了SSD512)上都比Yolo要好很多。图2给出了不同算法的基本框架图,对于Faster R-CNN,其先通过CNN得到候选框,然后再进行分类与回归,而Yolo与SSD可以一步到位完成检测。相比Yolo,SSD采用CNN来直接进行检测,而不是像Yolo那样在全连接层之后做检测。其实采用卷积直接做检测只是SSD相比Yolo的其中一个不同点,另外还有两个重要的改变,一是SSD提取了不同尺度的特征图来做检测,大尺度特征图(较靠前的特征图)可以用来检测小物体,而小尺度特征图(较靠后的特征图)用来检测大物体;二是SSD采用了不同尺度和长宽比的先验框(Prior boxes, Default boxes,在Faster R-CNN中叫做锚,Anchors)。Yolo算法缺点是难以检测小目标,而且定位不准,但是这几点重要改进使得SSD在一定程度上克服这些缺点。下面我们详细讲解SDD算法的原理,并最后给出如何用TensorFlow实现SSD算法。
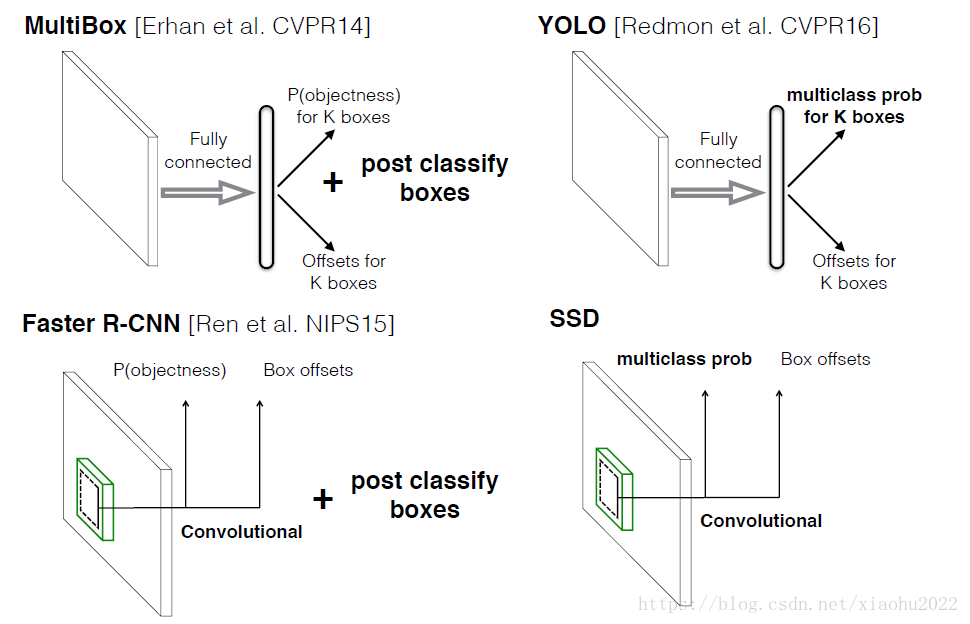
图2 不同算法的基本框架图
设计理念
SSD和Yolo一样都是采用一个CNN网络来进行检测,但是却采用了多尺度的特征图,其基本架构如图3所示。下面将SSD核心设计理念总结为以下三点:
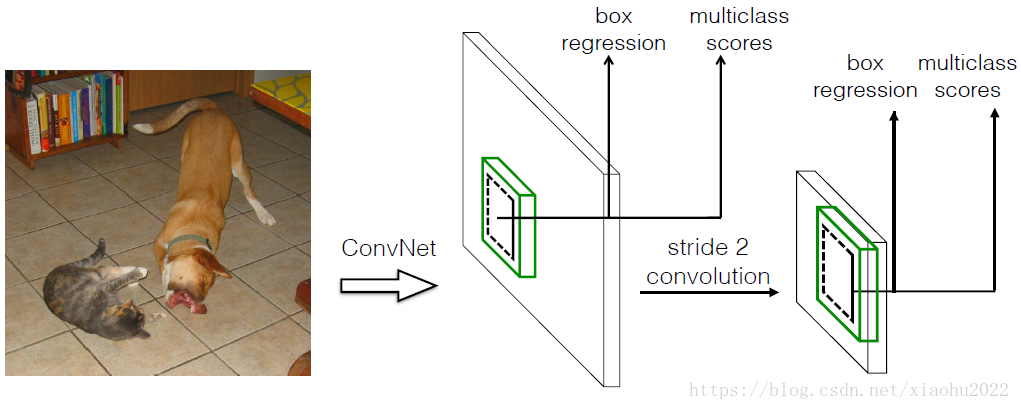
图3 SSD基本框架
(1)采用多尺度特征图用于检测
所谓多尺度采用大小不同的特征图,CNN网络一般前面的特征图比较大,后面会逐渐采用stride=2的卷积或者pool来降低特征图大小,这正如图3所示,一个比较大的特征图和一个比较小的特征图,它们都用来做检测。这样做的好处是比较大的特征图来用来检测相对较小的目标,而小的特征图负责检测大目标,如图4所示,8×8的特征图可以划分更多的单元,但是其每个单元的先验框尺度比较小。
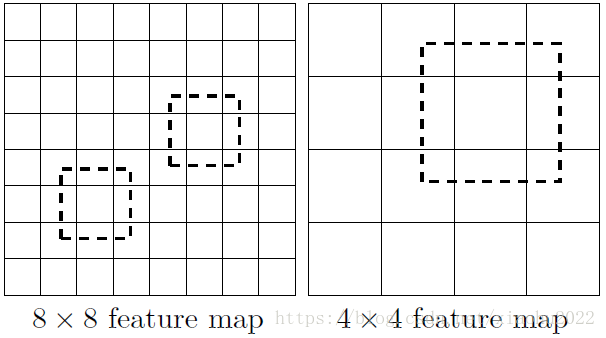
图4 不同尺度的特征图
(2)采用卷积进行检测
与Yolo最后采用全连接层不同,SSD直接采用卷积对不同的特征图来进行提取检测结果。对于形状为m×n×pm×n×p的特征图,只需要采用3×3×p3×3×p这样比较小的卷积核得到检测值。
(3)设置先验框
在Yolo中,每个单元预测多个边界框,但是其都是相对这个单元本身(正方块),但是真实目标的形状是多变的,Yolo需要在训练过程中自适应目标的形状。而SSD借鉴了Faster R-CNN中anchor的理念,每个单元设置尺度或者长宽比不同的先验框,预测的边界框(bounding boxes)是以这些先验框为基准的,在一定程度上减少训练难度。一般情况下,每个单元会设置多个先验框,其尺度和长宽比存在差异,如图5所示,可以看到每个单元使用了4个不同的先验框,图片中猫和狗分别采用最适合它们形状的先验框来进行训练,后面会详细讲解训练过程中的先验框匹配原则。
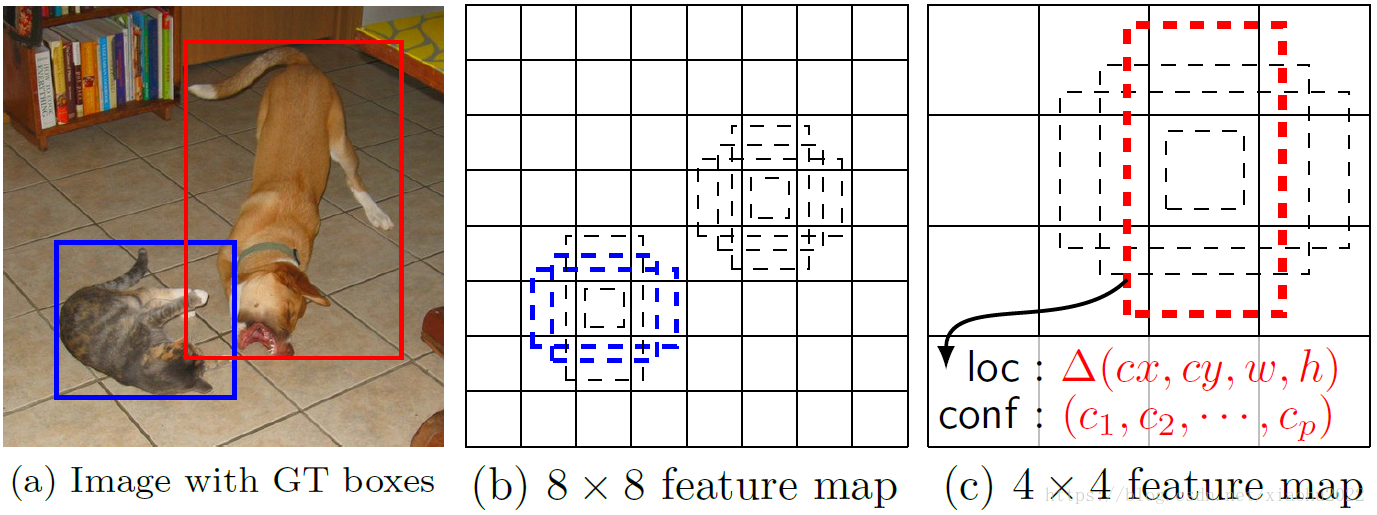
图5 SSD的先验框
SSD的检测值也与Yolo不太一样。对于每个单元的每个先验框,其都输出一套独立的检测值,对应一个边界框,主要分为两个部分。第一部分是各个类别的置信度或者评分,值得注意的是SSD将背景也当做了一个特殊的类别,如果检测目标共有cc个类别,SSD其实需要预测c+1c+1个置信度值,其中第一个置信度指的是不含目标或者属于背景的评分。后面当我们说cc个类别置信度时,请记住里面包含背景那个特殊的类别,即真实的检测类别只有c−1c−1个。在预测过程中,置信度最高的那个类别就是边界框所属的类别,特别地,当第一个置信度值最高时,表示边界框中并不包含目标。第二部分就是边界框的location,包含4个值(cx,cy,w,h)(cx,cy,w,h),分别表示边界框的中心坐标以及宽高。但是真实预测值其实只是边界框相对于先验框的转换值(paper里面说是offset,但是觉得transformation更合适,参见R-CNN)。先验框位置用d=(dcx,dcy,dw,dh)d=(dcx,dcy,dw,dh)表示,其对应边界框用b=(bcx,bcy,bw,bh)b=(bcx,bcy,bw,bh)表示,那么边界框的预测值ll其实是bb相对于dd的转换值:
lcx=(bcx−dcx)/dw, lcy=(bcy−dcy)/dh
lcx=(bcx−dcx)/dw, lcy=(bcy−dcy)/dh
lw=log(bw/dw), lh=log(bh/dh)
lw=log(bw/dw), lh=log(bh/dh)
习惯上,我们称上面这个过程为边界框的编码(encode),预测时,你需要反向这个过程,即进行解码(decode),从预测值ll中得到边界框的真实位置bb:
bcx=dwlcx+dcx, bcy=dylcy+dcy
bcx=dwlcx+dcx, bcy=dylcy+dcy
bw=dwexp(lw), bh=dhexp(lh)
bw=dwexp(lw), bh=dhexp(lh)
然而,在SSD的Caffe源码实现中还有trick,那就是设置variance超参数来调整检测值,通过bool参数variance_encoded_in_target来控制两种模式,当其为True时,表示variance被包含在预测值中,就是上面那种情况。但是如果是Fasle(大部分采用这种方式,训练更容易?),就需要手动设置超参数variance,用来对ll的4个值进行放缩,此时边界框需要这样解码:
bcx=dw(variance[0]∗lcx)+dcx, bcy=dy(variance[1]∗lcy)+dcy
bcx=dw(variance[0]∗lcx)+dcx, bcy=dy(variance[1]∗lcy)+dcy
bw=dwexp(variance[2]∗lw), bh=dhexp(variance[3]∗lh)
bw=dwexp(variance[2]∗lw), bh=dhexp(variance[3]∗lh)
综上所述,对于一个大小m×nm×n的特征图,共有mnmn个单元,每个单元设置的先验框数目记为kk,那么每个单元共需要(c+4)k(c+4)k个预测值,所有的单元共需要(c+4)kmn(c+4)kmn个预测值,由于SSD采用卷积做检测,所以就需要(c+4)k(c+4)k个卷积核完成这个特征图的检测过程。
网络结构
SSD采用VGG16作为基础模型,然后在VGG16的基础上新增了卷积层来获得更多的特征图以用于检测。SSD的网络结构如图6所示。上面是SSD模型,下面是Yolo模型,可以明显看到SSD利用了多尺度的特征图做检测。模型的输入图片大小是300×300300×300(还可以是512×512512×512,其与前者网络结构没有差别,只是最后新增一个卷积层,本文不再讨论)。
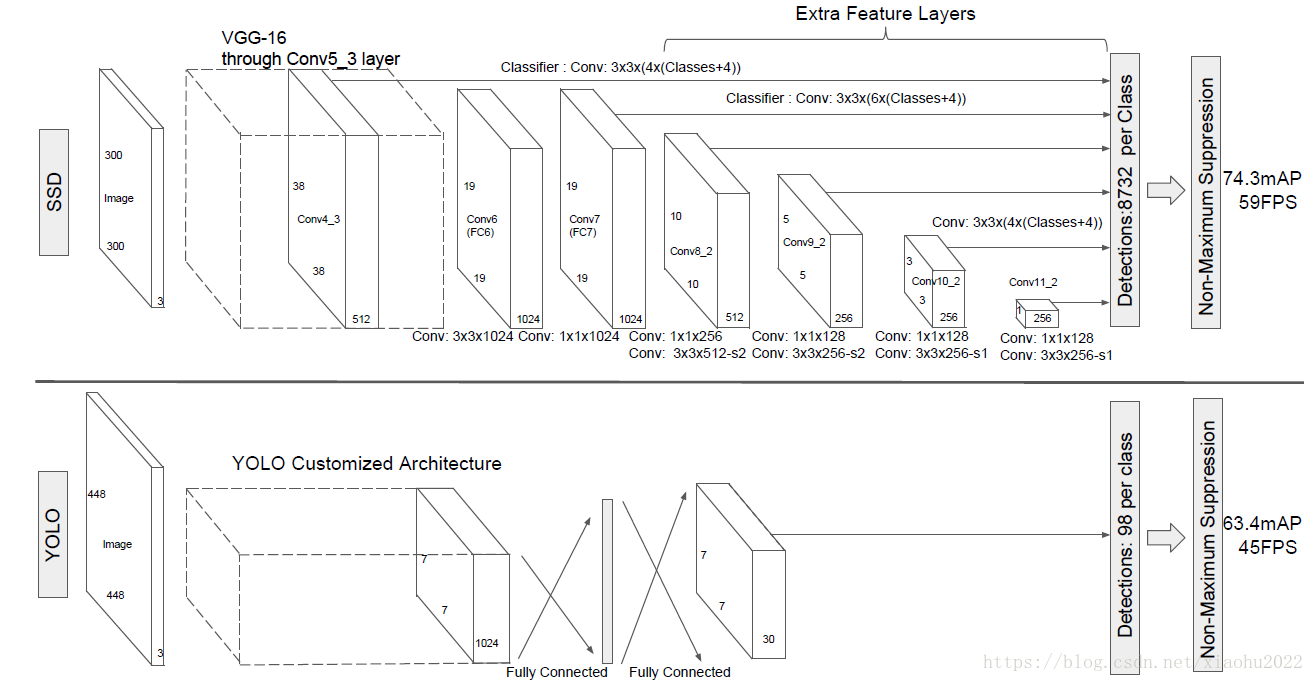
图6 SSD网络结构
采用VGG16做基础模型,首先VGG16是在ILSVRC CLS-LOC数据集预训练。然后借鉴了DeepLab-LargeFOV,分别将VGG16的全连接层fc6和fc7转换成3×33×3卷积层conv6和1×11×1卷积层conv7,同时将池化层pool5由原来的2×2−s22×2−s2变成3×3−s13×3−s1(猜想是不想reduce特征图大小),为了配合这种变化,采用了一种Atrous Algorithm,其实就是conv6采用扩展卷积或带孔卷积(Dilation Conv),其在不增加参数与模型复杂度的条件下指数级扩大卷积的视野,其使用扩张率(dilation rate)参数,来表示扩张的大小,如下图7所示,(a)是普通的3×33×3卷积,其视野就是3×33×3,(b)是扩张率为2,此时视野变成7×77×7,(c)扩张率为4时,视野扩大为15×1515×15,但是视野的特征更稀疏了。Conv6采用3×33×3大小但dilation rate=6的扩展卷积。
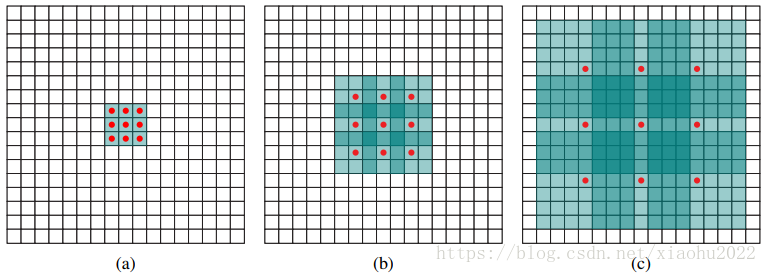
图7 扩展卷积
然后移除dropout层和fc8层,并新增一系列卷积层,在检测数据集上做finetuing。
其中VGG16中的Conv4_3层将作为用于检测的第一个特征图。conv4_3层特征图大小是38×3838×38,但是该层比较靠前,其norm较大,所以在其后面增加了一个L2 Normalization层(参见ParseNet),以保证和后面的检测层差异不是很大,这个和Batch Normalization层不太一样,其仅仅是对每个像素点在channle维度做归一化,而Batch Normalization层是在[batch_size, width, height]三个维度上做归一化。归一化后一般设置一个可训练的放缩变量gamma,使用TF可以这样简单实现:
|
1 2 3 4 5 6 7 8 9 |
# l2norm (not bacth norm, spatial normalization) def l2norm(x, scale, trainable=True, scope="L2Normalization"): n_channels = x.get_shape().as_list()[-1] l2_norm = tf.nn.l2_normalize(x, [3], epsilon=1e-12) with tf.variable_scope(scope): gamma = tf.get_variable("gamma", shape=[n_channels, ], dtype=tf.float32, initializer=tf.constant_initializer(scale), trainable=trainable) return l2_norm * gamma |
从后面新增的卷积层中提取Conv7,Conv8_2,Conv9_2,Conv10_2,Conv11_2作为检测所用的特征图,加上Conv4_3层,共提取了6个特征图,其大小分别是(38,38),(19,19),(10,10),(5,5),(3,3),(1,1)(38,38),(19,19),(10,10),(5,5),(3,3),(1,1),但是不同特征图设置的先验框数目不同(同一个特征图上每个单元设置的先验框是相同的,这里的数目指的是一个单元的先验框数目)。先验框的设置,包括尺度(或者说大小)和长宽比两个方面。对于先验框的尺度,其遵守一个线性递增规则:随着特征图大小降低,先验框尺度线性增加:
sk=smin+smax−sminm−1(k−1),k∈[1,m]
sk=smin+smax−sminm−1(k−1),k∈[1,m]
其中mm指的特征图个数,但却是55,因为第一层(Conv4_3层)是单独设置的,sksk表示先验框大小相对于图片的比例,而sminsmin和smaxsmax表示比例的最小值与最大值,paper里面取0.2和0.9。对于第一个特征图,其先验框的尺度比例一般设置为smin/2=0.1smin/2=0.1,那么尺度为300×0.1=30300×0.1=30。对于后面的特征图,先验框尺度按照上面公式线性增加,但是先将尺度比例先扩大100倍,此时增长步长为⌊⌊smax×100⌋−⌊smin×100⌋m−1⌋=17⌊⌊smax×100⌋−⌊smin×100⌋m−1⌋=17,这样各个特征图的sksk为20,37,54,71,8820,37,54,71,88,将这些比例除以100,然后再乘以图片大小,可以得到各个特征图的尺度为60,111,162,213,26460,111,162,213,264,这种计算方式是参考SSD的Caffe源码。综上,可以得到各个特征图的先验框尺度30,60,111,162,213,26430,60,111,162,213,264。对于长宽比,一般选取ar∈{1,2,3,12,13}ar∈{1,2,3,12,13},对于特定的长宽比,按如下公式计算先验框的宽度与高度(后面的sksk均指的是先验框实际尺度,而不是尺度比例):
wak=skar−−√, hak=sk/ar−−√
wka=skar, hka=sk/ar
默认情况下,每个特征图会有一个ar=1ar=1且尺度为sksk的先验框,除此之外,还会设置一个尺度为s′k=sksk+1−−−−−√sk′=sksk+1且ar=1ar=1的先验框,这样每个特征图都设置了两个长宽比为1但大小不同的正方形先验框。注意最后一个特征图需要参考一个虚拟sm+1=300×105/100=315sm+1=300×105/100=315来计算s′msm′。因此,每个特征图一共有66个先验框{1,2,3,12,13,1′}{1,2,3,12,13,1′},但是在实现时,Conv4_3,Conv10_2和Conv11_2层仅使用4个先验框,它们不使用长宽比为3,133,13的先验框。每个单元的先验框的中心点分布在各个单元的中心,即(i+0.5|fk|,j+0.5|fk|),i,j∈[0,|fk|)(i+0.5|fk|,j+0.5|fk|),i,j∈[0,|fk|),其中|fk||fk|为特征图的大小。
得到了特征图之后,需要对特征图进行卷积得到检测结果,图8给出了一个5×55×5大小的特征图的检测过程。其中Priorbox是得到先验框,前面已经介绍了生成规则。检测值包含两个部分:类别置信度和边界框位置,各采用一次3×33×3卷积来进行完成。令nknk为该特征图所采用的先验框数目,那么类别置信度需要的卷积核数量为nk×cnk×c,而边界框位置需要的卷积核数量为nk×4nk×4。由于每个先验框都会预测一个边界框,所以SSD300一共可以预测38×38×4+19×19×6+10×10×6+5×5×6+3×3×4+1×1×4=873238×38×4+19×19×6+10×10×6+5×5×6+3×3×4+1×1×4=8732个边界框,这是一个相当庞大的数字,所以说SSD本质上是密集采样。
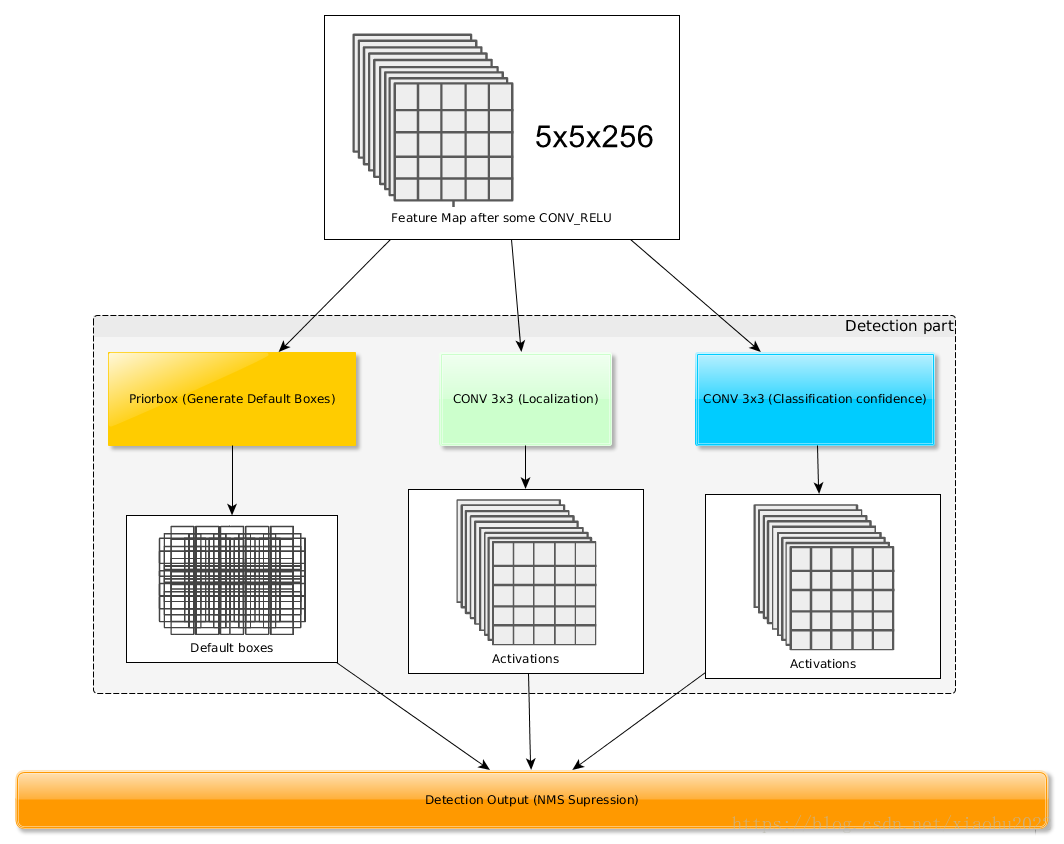
图8 基于卷积得到检测结果
训练过程
(1)先验框匹配
在训练过程中,首先要确定训练图片中的ground truth(真实目标)与哪个先验框来进行匹配,与之匹配的先验框所对应的边界框将负责预测它。在Yolo中,ground truth的中心落在哪个单元格,该单元格中与其IOU最大的边界框负责预测它。但是在SSD中却完全不一样,SSD的先验框与ground truth的匹配原则主要有两点。首先,对于图片中每个ground truth,找到与其IOU最大的先验框,该先验框与其匹配,这样,可以保证每个ground truth一定与某个先验框匹配。通常称与ground truth匹配的先验框为正样本,反之,若一个先验框没有与任何ground truth进行匹配,那么该先验框只能与背景匹配,就是负样本。一个图片中ground truth是非常少的, 而先验框却很多,如果仅按第一个原则匹配,很多先验框会是负样本,正负样本极其不平衡,所以需要第二个原则。第二个原则是:对于剩余的未匹配先验框,若某个ground truth的IOU大于某个阈值(一般是0.5),那么该先验框也与这个ground truth进行匹配。这意味着某个ground truth可能与多个先验框匹配,这是可以的。但是反过来却不可以,因为一个先验框只能匹配一个ground truth,如果多个ground truth与某个先验框IOU大于阈值,那么先验框只与IOU最大的那个先验框进行匹配。第二个原则一定在第一个原则之后进行,仔细考虑一下这种情况,如果某个ground truth所对应最大IOU小于阈值,并且所匹配的先验框却与另外一个ground truth的IOU大于阈值,那么该先验框应该匹配谁,答案应该是前者,首先要确保某个ground truth一定有一个先验框与之匹配。但是,这种情况我觉得基本上是不存在的。由于先验框很多,某个ground truth的最大IOU肯定大于阈值,所以可能只实施第二个原则既可以了,这里的TensorFlow版本就是只实施了第二个原则,但是这里的Pytorch两个原则都实施了。图9为一个匹配示意图,其中绿色的GT是ground truth,红色为先验框,FP表示负样本,TP表示正样本。
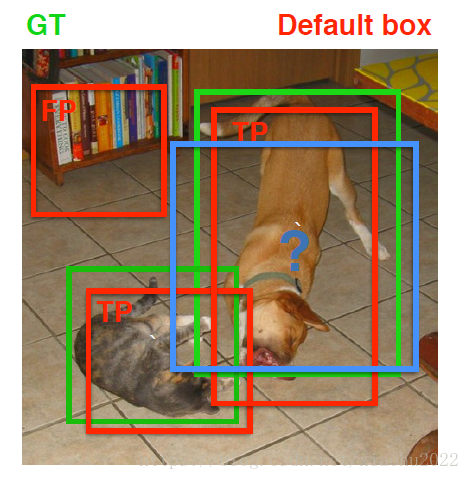
图9 先验框匹配示意图
尽管一个ground truth可以与多个先验框匹配,但是ground truth相对先验框还是太少了,所以负样本相对正样本会很多。为了保证正负样本尽量平衡,SSD采用了hard negative mining,就是对负样本进行抽样,抽样时按照置信度误差(预测背景的置信度越小,误差越大)进行降序排列,选取误差的较大的top-k作为训练的负样本,以保证正负样本比例接近1:3。
(2)损失函数
训练样本确定了,然后就是损失函数了。损失函数定义为位置误差(locatization loss, loc)与置信度误差(confidence loss, conf)的加权和:
L(x,c,l,g)=1N(Lconf(x,c)+αLloc(x,l,g))
L(x,c,l,g)=1N(Lconf(x,c)+αLloc(x,l,g))
其中NN是先验框的正样本数量。这里xpij∈{1,0}xijp∈{1,0}为一个指示参数,当xpij=1xijp=1时表示第ii个先验框与第jj个ground truth匹配,并且ground truth的类别为pp。cc为类别置信度预测值。ll为先验框的所对应边界框的位置预测值,而gg是ground truth的位置参数。对于位置误差,其采用Smooth L1 loss,定义如下:
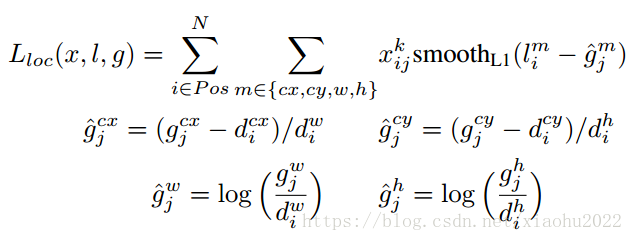
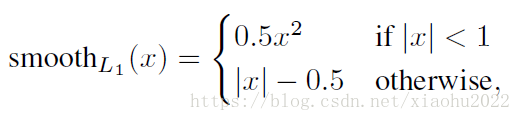
由于xpijxijp的存在,所以位置误差仅针对正样本进行计算。值得注意的是,要先对ground truth的gg进行编码得到g^g^,因为预测值ll也是编码值,若设置variance_encoded_in_target=True,编码时要加上variance:
g^cxj=(gcxj−dcxi)/dwi/variance[0],g^cyj=(gcyj−dcyi)/dhi/variance[1]
g^jcx=(gjcx−dicx)/diw/variance[0],g^jcy=(gjcy−dicy)/dih/variance[1]
g^wj=log(gwj/dwi)/variance[2], g^hj=log(ghj/dhi)/variance[3]
g^jw=log(gjw/diw)/variance[2], g^jh=log(gjh/dih)/variance[3]
对于置信度误差,其采用softmax loss:

权重系数αα通过交叉验证设置为1。
(3)数据扩增
采用数据扩增(Data Augmentation)可以提升SSD的性能,主要采用的技术有水平翻转(horizontal flip),随机裁剪加颜色扭曲(random crop & color distortion),随机采集块域(Randomly sample a patch)(获取小目标训练样本),如下图所示:
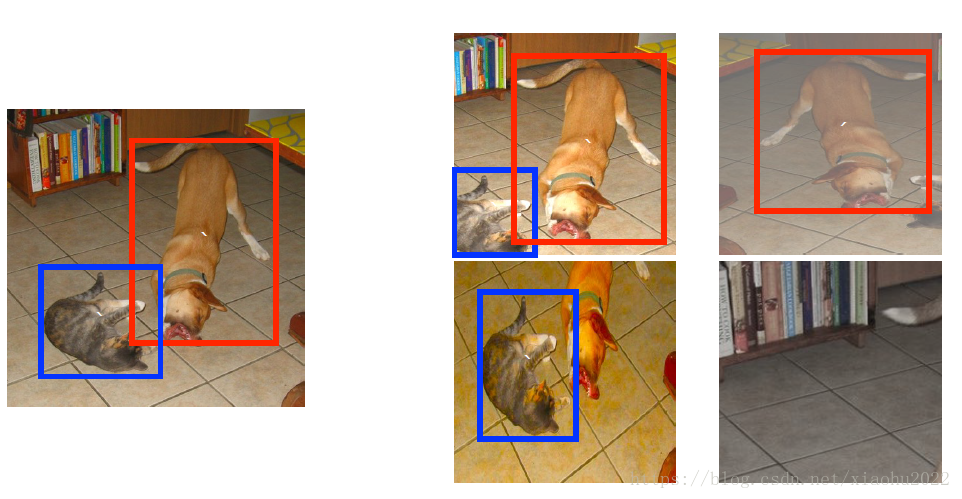
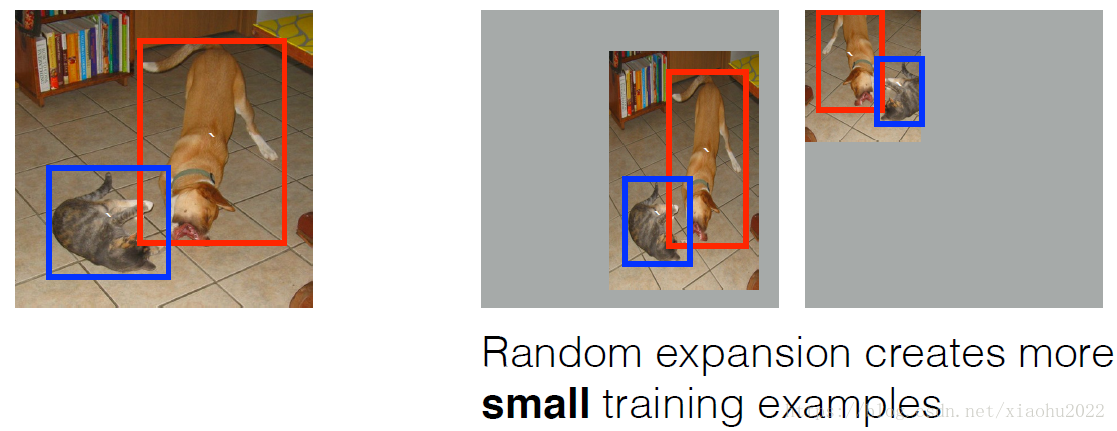
图10 数据扩增方案
其它的训练细节如学习速率的选择详见论文,这里不再赘述。
预测过程
预测过程比较简单,对于每个预测框,首先根据类别置信度确定其类别(置信度最大者)与置信度值,并过滤掉属于背景的预测框。然后根据置信度阈值(如0.5)过滤掉阈值较低的预测框。对于留下的预测框进行解码,根据先验框得到其真实的位置参数(解码后一般还需要做clip,防止预测框位置超出图片)。解码之后,一般需要根据置信度进行降序排列,然后仅保留top-k(如400)个预测框。最后就是进行NMS算法,过滤掉那些重叠度较大的预测框。最后剩余的预测框就是检测结果了。
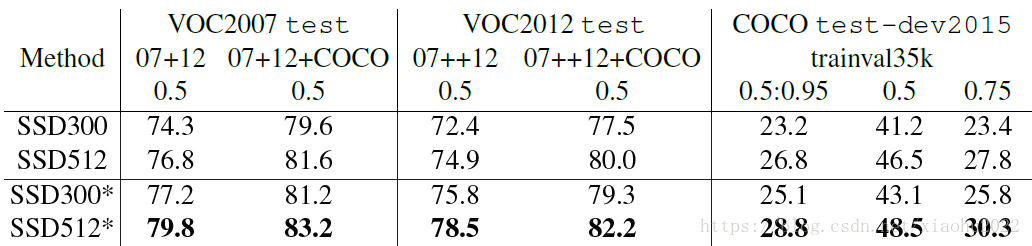
性能评估
首先整体看一下SSD在VOC2007,VOC2012及COCO数据集上的性能,如表1所示。相比之下,SSD512的性能会更好一些。加*的表示使用了image expansion data augmentation(通过zoom out来创造小的训练样本)技巧来提升SSD在小目标上的检测效果,所以性能会有所提升。
表1 SSD在不同数据集上的性能
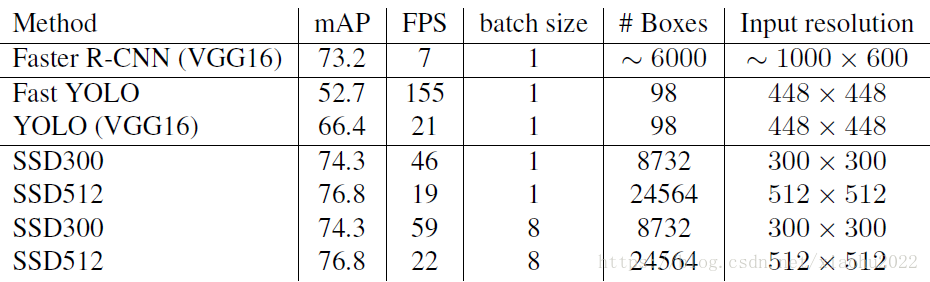
SSD与其它检测算法的对比结果(在VOC2007数据集)如表2所示,基本可以看到,SSD与Faster R-CNN有同样的准确度,并且与Yolo具有同样较快地检测速度。
表2 SSD与其它检测算法的对比结果(在VOC2007数据集)
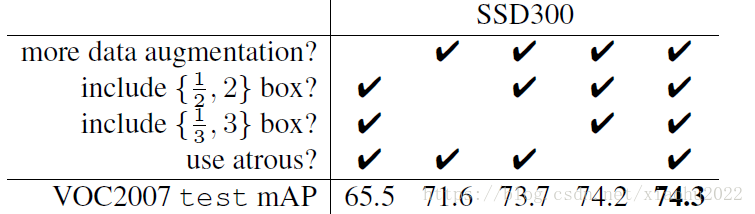
文章还对SSD的各个trick做了更为细致的分析,表3为不同的trick组合对SSD的性能影响,从表中可以得出如下结论:
数据扩增技术很重要,对于mAP的提升很大;
使用不同长宽比的先验框可以得到更好的结果;
表3 不同的trick组合对SSD的性能影响
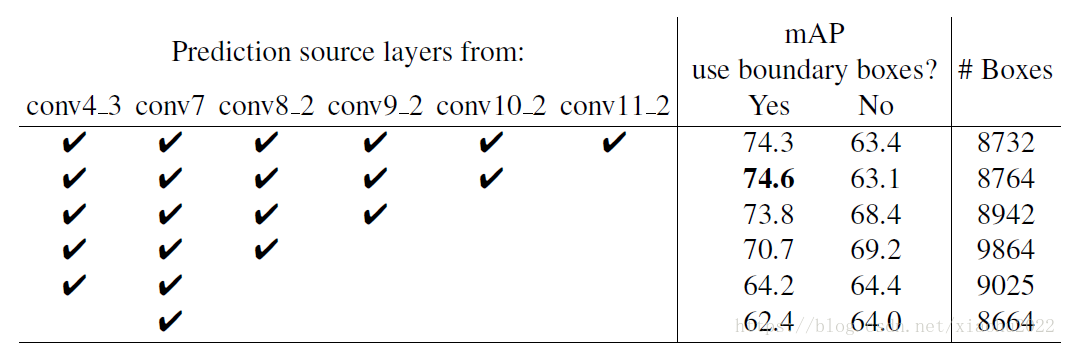
同样的,采用多尺度的特征图用于检测也是至关重要的,这可以从表4中看出:
表4 多尺度特征图对SSD的影响
TensorFlow上的实现
SSD在很多框架上都有了开源的实现,这里基于balancap的TensorFlow版本来实现SSD的Inference过程。这里实现的是SSD300,与paper里面不同的是,这里采用smin=0.15,smax=0.9smin=0.15,smax=0.9。首先定义SSD的参数:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 |
self.ssd_params = SSDParams(img_shape=(300, 300), # 输入图片大小 num_classes=21, # 类别数+背景 no_annotation_label=21, feat_layers=["block4", "block7", "block8", "block9", "block10", "block11"], # 要进行检测的特征图name feat_shapes=[(38, 38), (19, 19), (10, 10), (5, 5), (3, 3), (1, 1)], # 特征图大小 anchor_size_bounds=[0.15, 0.90], # 特征图尺度范围 anchor_sizes=[(21., 45.), (45., 99.), (99., 153.), (153., 207.), (207., 261.), (261., 315.)], # 不同特征图的先验框尺度(第一个值是s_k,第2个值是s_k+1) anchor_ratios=[[2, .5], [2, .5, 3, 1. / 3], [2, .5, 3, 1. / 3], [2, .5, 3, 1. / 3], [2, .5], [2, .5]], # 特征图先验框所采用的长宽比(每个特征图都有2个正方形先验框) anchor_steps=[8, 16, 32, 64, 100, 300], # 特征图的单元大小 anchor_offset=0.5, # 偏移值,确定先验框中心 normalizations=[20, -1, -1, -1, -1, -1], # l2 norm prior_scaling=[0.1, 0.1, 0.2, 0.2] # variance ) |
然后构建整个网络,注意对于stride=2的conv不要使用TF自带的padding=”same”,而是手动pad,这是为了与Caffe一致:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 |
def _built_net(self): """Construct the SSD net""" self.end_points = {} # record the detection layers output self._images = tf.placeholder(tf.float32, shape=[None, self.ssd_params.img_shape[0], self.ssd_params.img_shape[1], 3]) with tf.variable_scope("ssd_300_vgg"): # original vgg layers # block 1 net = conv2d(self._images, 64, 3, scope="conv1_1") net = conv2d(net, 64, 3, scope="conv1_2") self.end_points["block1"] = net net = max_pool2d(net, 2, scope="pool1") # block 2 net = conv2d(net, 128, 3, scope="conv2_1") net = conv2d(net, 128, 3, scope="conv2_2") self.end_points["block2"] = net net = max_pool2d(net, 2, scope="pool2") # block 3 net = conv2d(net, 256, 3, scope="conv3_1") net = conv2d(net, 256, 3, scope="conv3_2") net = conv2d(net, 256, 3, scope="conv3_3") self.end_points["block3"] = net net = max_pool2d(net, 2, scope="pool3") # block 4 net = conv2d(net, 512, 3, scope="conv4_1") net = conv2d(net, 512, 3, scope="conv4_2") net = conv2d(net, 512, 3, scope="conv4_3") self.end_points["block4"] = net net = max_pool2d(net, 2, scope="pool4") # block 5 net = conv2d(net, 512, 3, scope="conv5_1") net = conv2d(net, 512, 3, scope="conv5_2") net = conv2d(net, 512, 3, scope="conv5_3") self.end_points["block5"] = net net = max_pool2d(net, 3, stride=1, scope="pool5") # additional SSD layers # block 6: use dilate conv net = conv2d(net, 1024, 3, dilation_rate=6, scope="conv6") self.end_points["block6"] = net #net = dropout(net, is_training=self.is_training) # block 7 net = conv2d(net, 1024, 1, scope="conv7") self.end_points["block7"] = net # block 8 net = conv2d(net, 256, 1, scope="conv8_1x1") net = conv2d(pad2d(net, 1), 512, 3, stride=2, scope="conv8_3x3", padding="valid") self.end_points["block8"] = net # block 9 net = conv2d(net, 128, 1, scope="conv9_1x1") net = conv2d(pad2d(net, 1), 256, 3, stride=2, scope="conv9_3x3", padding="valid") self.end_points["block9"] = net # block 10 net = conv2d(net, 128, 1, scope="conv10_1x1") net = conv2d(net, 256, 3, scope="conv10_3x3", padding="valid") self.end_points["block10"] = net # block 11 net = conv2d(net, 128, 1, scope="conv11_1x1") net = conv2d(net, 256, 3, scope="conv11_3x3", padding="valid") self.end_points["block11"] = net # class and location predictions predictions = [] logits = [] locations = [] for i, layer in enumerate(self.ssd_params.feat_layers): cls, loc = ssd_multibox_layer(self.end_points[layer], self.ssd_params.num_classes, self.ssd_params.anchor_sizes[i], self.ssd_params.anchor_ratios[i], self.ssd_params.normalizations[i], scope=layer+"_box") predictions.append(tf.nn.softmax(cls)) logits.append(cls) locations.append(loc) return predictions, logits, locations |
对于特征图的检测,这里单独定义了一个组合层ssd_multibox_layer,其主要是对特征图进行两次卷积,分别得到类别置信度与边界框位置:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
# multibox layer: get class and location predicitions from detection layer def ssd_multibox_layer(x, num_classes, sizes, ratios, normalization=-1, scope="multibox"): pre_shape = x.get_shape().as_list()[1:-1] pre_shape = [-1] + pre_shape with tf.variable_scope(scope): # l2 norm if normalization > 0: x = l2norm(x, normalization) print(x) # numbers of anchors n_anchors = len(sizes) + len(ratios) # location predictions loc_pred = conv2d(x, n_anchors*4, 3, activation=None, scope="conv_loc") loc_pred = tf.reshape(loc_pred, pre_shape + [n_anchors, 4]) # class prediction cls_pred = conv2d(x, n_anchors*num_classes, 3, activation=None, scope="conv_cls") cls_pred = tf.reshape(cls_pred, pre_shape + [n_anchors, num_classes]) return cls_pred, loc_pred |
对于先验框,可以基于numpy生成,定义在ssd_anchors.py文件中,结合先验框与检测值,对边界框进行过滤与解码:
|
1 |
classes, scores, bboxes = self._bboxes_select(predictions, locations) |
这里将得到过滤得到的边界框,其中classes, scores, bboxes分别表示类别,置信度值以及边界框位置。
基于训练好的权重文件在这里下载,这里对SSD进行测试:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 |
ssd_net = SSD() classes, scores, bboxes = ssd_net.detections() images = ssd_net.images() sess = tf.Session() # Restore SSD model. ckpt_filename = './ssd_checkpoints/ssd_vgg_300_weights.ckpt' sess.run(tf.global_variables_initializer()) saver = tf.train.Saver() saver.restore(sess, ckpt_filename) img = cv2.imread('./demo/dog.jpg') img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) img_prepocessed = preprocess_image(img) # 预处理图片,主要是归一化和resize rclasses, rscores, rbboxes = sess.run([classes, scores, bboxes], feed_dict={images: img_prepocessed}) rclasses, rscores, rbboxes = process_bboxes(rclasses, rscores, rbboxes) # 处理预测框,包括clip,sort,nms plt_bboxes(img, rclasses, rscores, rbboxes) # 绘制检测结果详细的代码放在GitHub上了,然后看一下一个自然图片的检测效果: |
如果你想实现SSD的train过程,你可以参考附录里面的Caffe,TensorFlow以及Pytorch实现。
小结
SSD在Yolo的基础上主要改进了三点:多尺度特征图,利用卷积进行检测,设置先验框。这使得SSD在准确度上比Yolo更好,而且对于小目标检测效果也相对好一点。由于很多实现细节都包含在源码里面,文中有描述不准或者错误的地方在所难免,欢迎交流指正。
参考文献
SSD: Single Shot MultiBox Detector
SSD Slide
SSD Caffe
SSD TensorFlow
SSD Pytorch
leonardoaraujosantos Artificial Inteligence online book
———————
作者:xiaohu2022
来源:CSDN
原文:https://blog.csdn.net/xiaohu2022/article/details/79833786
版权声明:本文为博主原创文章,转载请附上博文链接!
转载请注明:徐自远的乱七八糟小站 » 目标检测算法之SSD