【走进机器人和模型所用的电机和电调(二)】
本期,小编将为各位看官介绍一下电机的参数、特性,以便大家在机器人与模型的实际制作中对电机的使用游刃有余。
电机常见参数:T数,转速,无刷电机KV值,尺寸,轴径,2极/4极是什么,有感和无感是什么?
电机T数:
T,英文Turn,线圈绕了多少圈的意思,例如线圈绕了21圈,则称为21T。某些品牌也称为R,Round的缩写,相同的意思,都是绕线圈数。
有刷电机因为绕线都是从铜头开始,然后也在铜头处结束,因此有刷都是整数圈,例如20T,30T等。
无刷电机因为结构限制,常见都是从输入端开始,结束于另外一侧,因此常见都是多半圈,于是大多数都是4.5,8.5,21.5T这样的。也有一些结构比较特殊的是整数圈,例如4T。这种整数圈的相对很少。
不管有刷还是无刷,同系列相同尺寸的情况下,都是线圈是越小,则电机的转速与扭矩越大,耗电与发热越高,能提供更强劲的动力输出。
此前我们都有留意到网上不少流传,说T数高的电机,扭力比T数低的要大。这个是完完全全的误区。电机的T数类似于真车的排量,T数越小则相当于排量越高,能提供越大的功率和扭矩。选择什么T数,则是根据需要搭配的问题,还要牵涉到齿轮比的搭配。由于这部分知识更偏重于机械知识,请大家自行在网上学习吧。
无刷电机和有刷电机之间的T数对应关系:往往我们认为无刷电机的T数,乘以2~2.5之间,得出的数值,这个数值T数的有刷,就与这个无刷T数的功率与扭矩比较接近。例如一个8.5T的无刷,大约就是17~21T之间的有刷接近;再例如一个21.5T的无刷,跟一个43~55T之间的有刷接近。
转速/KV值:
有刷电机有些会标出转速,例如30000rpm @ 7.2V,意思则是7.2V时电机可以实现三万转每分钟的空载转速。
无刷电机则常见是标KV值,无刷的KV值是无刷特有,是指电压每增加1V,电机的转速增加多少RPM,例如3000KV意思则为每提高1V的电压能让电机转速增加3000RPM,因此我们可以换算得到这个电机在8.4V满电的锂电下,转速是8.4×3000=25200RPM
无刷电机一但做好,其T数和KV值则是固定的,例如某品牌某型号的8.5T是4000KV,10.5T是3300KV这样。于是无刷电机在销售时有些会只标T数,或者只标KV值,并非所有型号都会标上T数和KV值,但是在规格参数中这2项基本都不会缺席。
标T数的,主要是3650的电机,而其他类型的则主要标KV值。这个是国际惯例有关的问题。
输出轴径:
电机需要带动车子转动,要输出动力,自然是需要靠输出的那根轴来安装马达齿或者传动轴,于是这根输出轴的尺寸就成了必须要考虑的因素。常见轴径有:2mm,3.175mm,5mm,8mm等。
尺寸:
在有刷时代,我们会说380,540,550,775之类,是我们口头叫法,一般加上”RS-“前缀比较严谨,例如RS-540。这些都是规格的代名词,380约等于无刷的2838,540约等于无刷电机的3650,550约等于无刷电机的3656,775约等于无刷电机的4268。
到了无刷时代,或者是无核心有刷电机时代,就已经开始使用尺寸表示法来直观地表示电机尺寸。例如3650意思为电机外壳直径36mm,长度50mm;而3656就是直径36mm,长度56mm;4268为直径42mm,长度68mm。由此标定电机的型号,常见有2030/2838/3650/3656/3660/3674/4068/4074/4268/4274/5874等等,不同尺寸的电机有不同的用途。
下图是一个4068电机的尺寸参数,上面还标示了电机固定螺丝的孔距,主流是25MM对角螺丝中心距。

无刷电机同尺寸同极数时,KV越大,T数越低的电机,功率和扭矩都会越大。而尺寸越大的电机,往往可以提供更大的功率和扭矩。因此如果想要增加车子的暴力程度,只需要在车架马达座空间允许的情况下,更换更大尺寸的电机,或者更换更高KV值(更低T数)的电机,搭配好齿比就可以实现。
尺寸越小的无刷电机,由于转子和线圈都更小,往往KV值都很高。例如一个2030的无刷电机,KV值常在6000以上,而4274的电机,KV值则往往只有2000左右。因此KV值的高低不能决定一个电机的功率以及扭矩。尺寸才是主要决定功率与扭矩的重要因素。所以大尺寸的车架,都是用大尺寸的电机,搭配更高的电压。
无刷电机极数的问题:
磁极,pole,这个跟绕线方式以及转子有密切关系。典型的无刷电机是2磁极,简称2极电机,也就是转子只有1个S南极和1个N北极(1S1N),对称地分布在转子的2侧,相应地使用3组绕线(3槽),就可以驱动。
而多磁极侧都是2磁极的倍数关系,例如4磁极(2S2N),6磁极(3S3N),8磁极(4S4N)等等,这些是把转子平均地分割成多个磁极区间。相应地,绕组也需要是3组的倍数关系,例如4磁极需要6组绕线(6槽),6磁极需要9组绕线(9槽),8磁极则需要12组绕线(12槽)。
涉及到效率等因素影响,一般4极或者6极电机的绕线组还会翻倍,例如4极用12组绕线(12槽),6极用18组绕线(18槽)
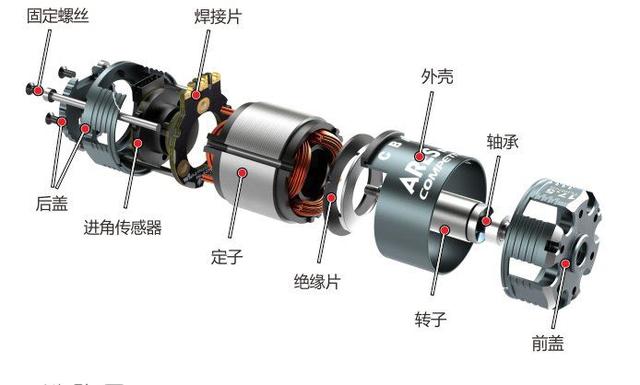
4磁极甚至6磁极工艺要求更高,但是带来的效率也更高,发热更低,是以后的发展方向。模型上目前1/16,1/18,1/10动力则使用2极电机为主,而1/8动力则是4极为主,也有一些是6极的。下面的图片是一个典型3650 2极电机的构造,可以看到是3组绕线。
下面的图片则是4极12槽的解剖图,转子上这个图清晰可见4个磁极,2个S以及2个N,实际很多转子都是纯圆,我们肉眼是看不到磁极位置的。

无刷电机的有感与无感问题:
有刷电机由于只需要向碳刷提供固定的电流就可以让转子自动转动,而不需要像无刷电调那样持续地变换电流以及电流的方向来提供变化的磁场以驱动转子,因此有刷电机不存在有感还是无感的问题。
而无刷,如上述,需要时刻改变电流以及方向,因此如果能随时都知道转子的位置,对于电调来说,就方便很多了。
无感电机,在启动时由于不知道转子磁极位置,只能随机变换电流,类似于“蒙”,总有一个时候转子会转动起来,而转子转动起来之后,就能靠线圈上的电流变化来计算转子的位置,从而控制电流与方向。这就是为什么无感无刷在起步时,总是有咔咔咔的症状。
而有感则不同,有了感应器,电调从一开始就知道转子磁极位置,直接就能给对应的线圈提供对应的电流,以驱动转子。但是电流很小时,电机就会发出持续的吱吱吱的声音。这就是为什么有感电机在低速时会听到连续的类似吱吱吱的声音,而无感则不会。
因此有感电机,都会有一根专用的感应线,从电机连接到电调上。必须同时接好电调与电机上的感应线,才能让电机工作在有感模式。
无感电机的优势:没有感应器,成本更低,而且可以直接泡水;缺点是线性不如有感电机。
有感电机的优势:电机的线性更佳,手感更棒;缺点是造价高,且不容易做防水。
说到这里,再牵涉到无刷电机的接线问题:
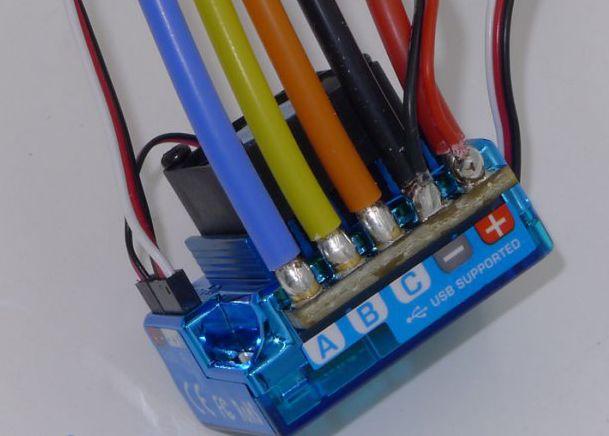
无刷电机都有3根线,标号为ABC,国际标准颜色对应为:A蓝色,B黄色,C橙色。
对于无感电机,ABC是可以随便对接,都不要紧,一旦发生电机转动方向为反向时,只需要任意对换2根线就可以解决。
但是对于有感电机,由于电调是随时知道磁极位置,会准确地控制信号,因此有感状态下,是严禁接错ABC的顺序。
有感接错ABC的后果是:小电流时电机无法启动,会有明显抖动,强行大电流时,会导致线材严重发热,电机线圈过热,最后有可能电机与电调都烧毁。
因此提醒各位玩家,在使用有感时,切记一定要对准ABC,决不可接错。在第一次通电时,注意小电流看电机的反应,错了及时改过来基本都没事。但是强制大油门则可能造成报废。
下图是一颗好盈120A电调上面的ABC与正负极标记:红色正极,黑色负极,橙色C,黄色B,蓝色A。
涉水的额外小提示:虽然无感无刷电机和有刷电机都可以直接防水,但是涉水之后,都要及时清理干净电机和电调上的水份,防止插头氧化,并添加轴承油以防止电机轴承干涉/锈蚀等问题。电调如果带风扇的,泡水时一定要把风扇拔掉,否则风扇会因为在水中无法工作而烧掉。
下期,我们将对电调的相关参数进行介绍。敬请期待!

转载请注明:徐自远的乱七八糟小站 » 【走进机器人和模型所用的电机和电调(二)】