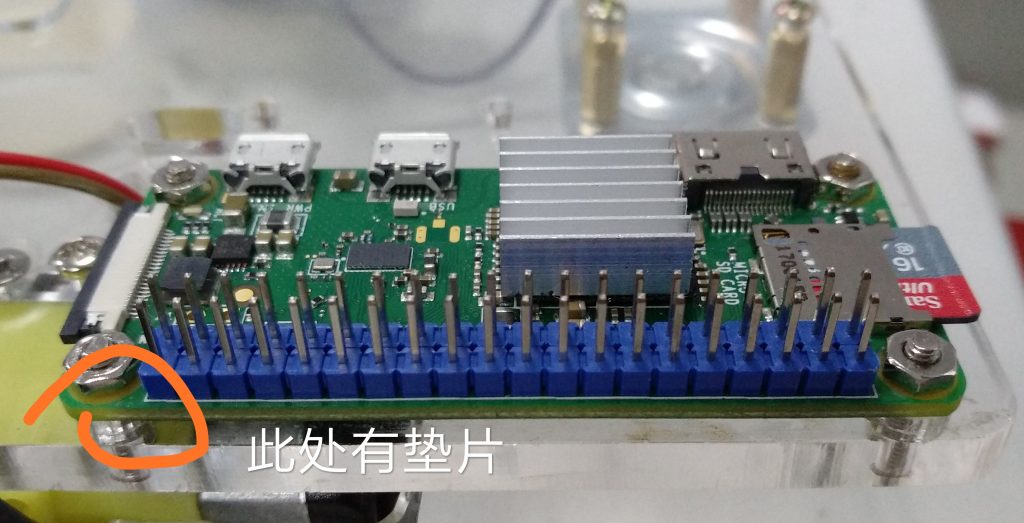
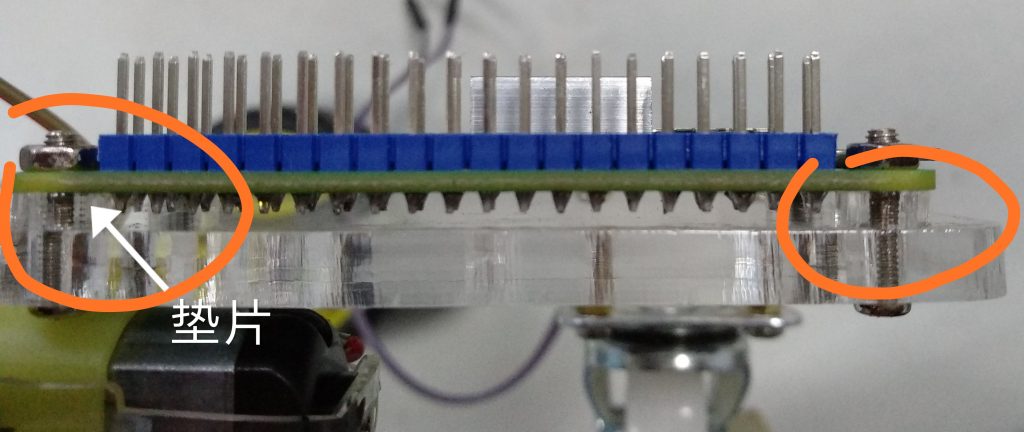
步骤1,安装树莓派zero。
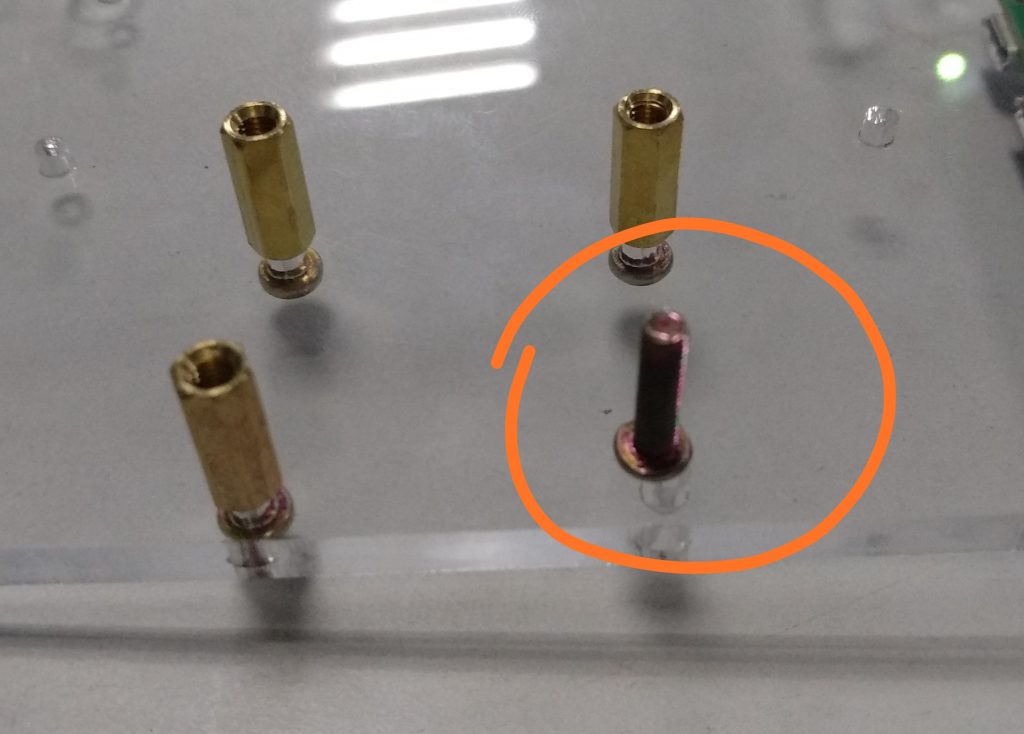
注意:树梅派四个脚应该都有垫片。垫片位置如下图所示。
步骤2:安装TT马达
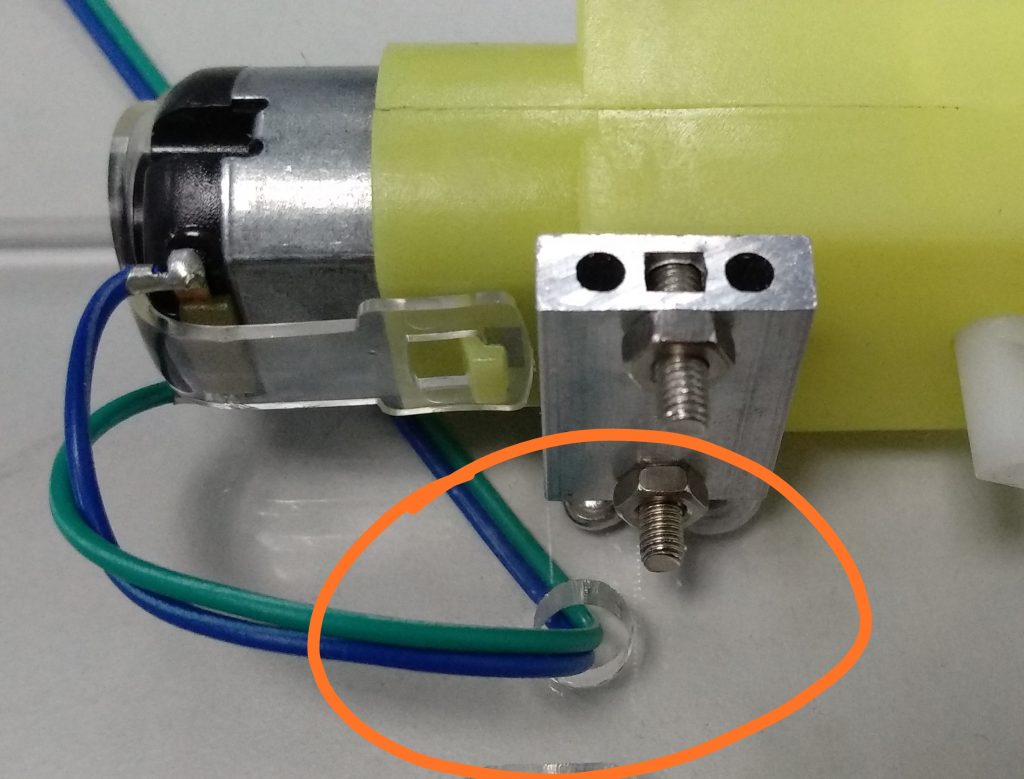
注意,此处螺丝要和铝合金块边缘齐平,不要突出。
注意:铝合金一端是有螺纹的,一端是没有螺纹的。大家要注意,有螺纹的一端朝着压克力底板安装螺丝。

步骤3:在压克力底板上安装TT马达。
注意:安装时TT马达的突起点朝外。

一端装平头螺丝,一端装圆头螺丝。如上图所示。
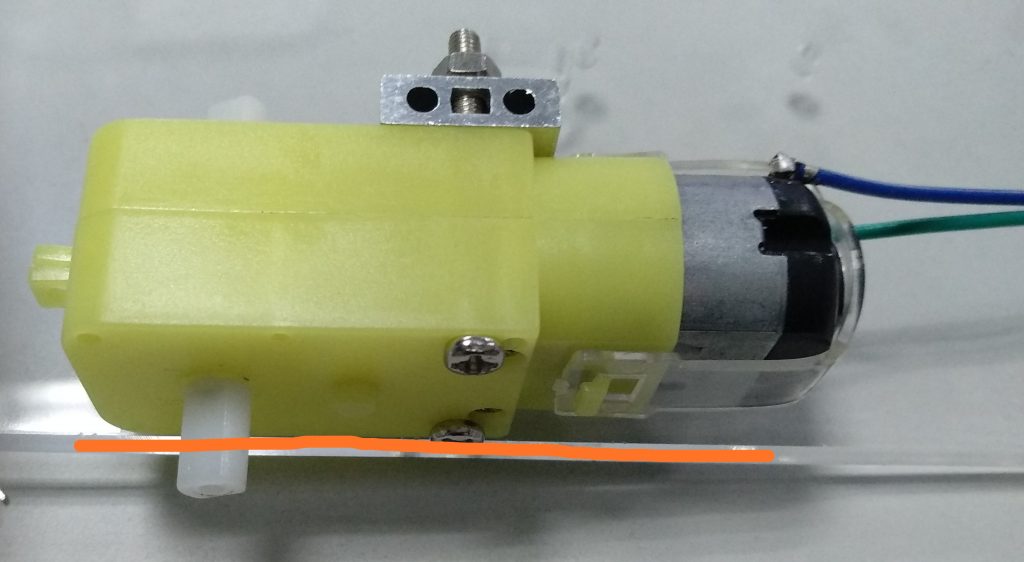
注意:TT马达和底板边缘要平行。
步骤4:安装万向轮
用12mm长的圆头螺丝将铜柱安装在底板上。

用6mm长的圆头螺丝安装万向轮
步骤5:将电机线穿过底板小圆孔
步骤6:安装充电宝
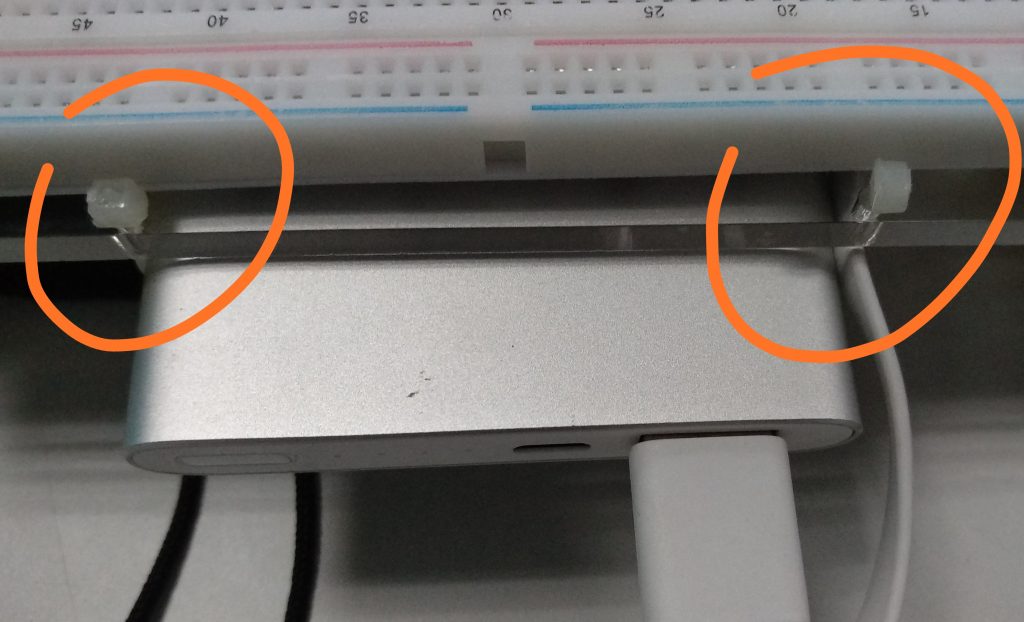
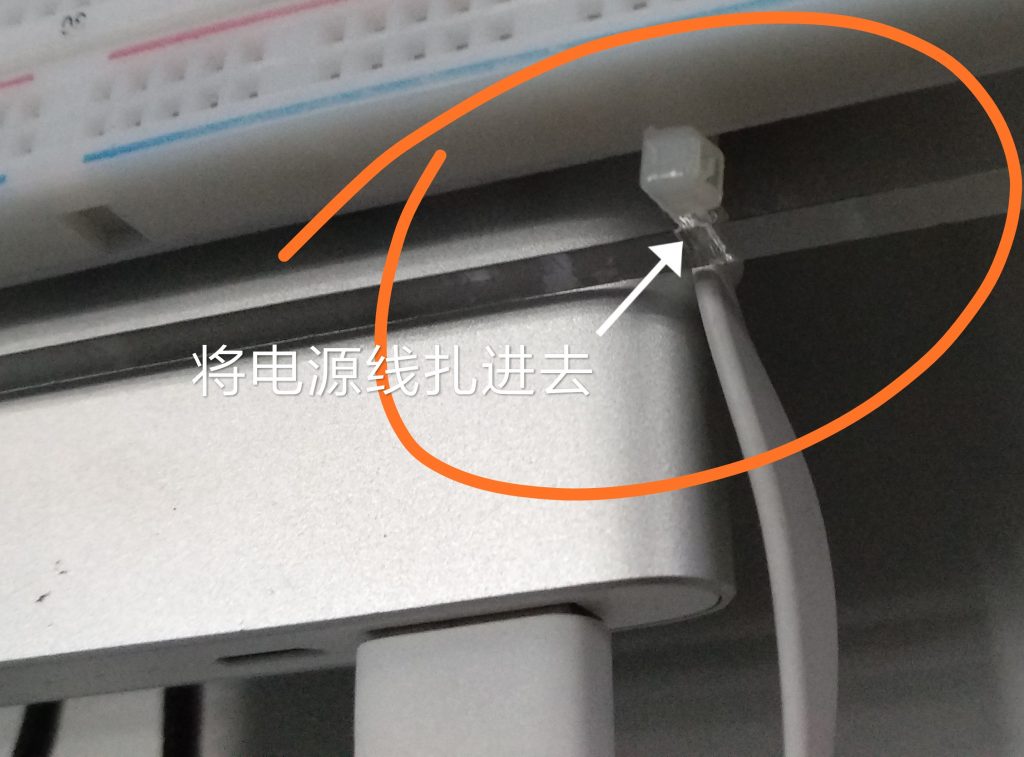
注意:充电宝usb接口侧靠近树梅派zero侧,电源线和电池一起由扎带固定。
步骤7:将面包板贴在小车底板上。

注意:如果面包板的背胶贴纸超过其边缘,用剪刀将多余部分剪去。

扎带不要过松或过紧,达到防止导线松脱的目的即可。
将电机的导线连接到电机驱动板的接线柱位置。左端电机接A+和A- 右端电机接B+B-。
小车联机调试
1,打开命令行窗口,ping一下树梅派zero,看看是否能联通。
|
1 |
ping raspberry00.local #注意,将00改为你自己的组名 |
2,修改LED程序
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
from gpiozero import LED from gpiozero.pins.pigpio import PiGPIOFactory from signal import pause from time import sleep factory = PiGPIOFactory(host='raspberry00.local') red=LED(2,pin_factory=factory) #red.blink(on_time=0.5,off_time=0.5,n=5) while True: red.toggle() sleep(0.2) |
转载请注明:徐自远的乱七八糟小站 » 20180926 树莓派zero小车制作