【从安装到做项目一步步教你ROS学习入门】
第一次接触ROS是在沈阳自动化所做项目的时候,那时候我才知道自己非常感兴趣的机器人领域有一个叫做ROS(Robot Operating System)的平台。仔细了解之后才知道ROS被机器人界看作是一套准标准平台,很多人将其比作是手机界的安卓,电脑界的微软。在我看来ROS最大的优点在于灵活、低耦合、分布式、开源以及功能强大而丰富的第三方功能包(类似于编程语言中的库)。于是我乘着毕设的机会申请了做ROS相关的项目–自主导航小车PlantBot。
ROS虽然叫操作系统,但是真正底层的任务调度、编译、寻址等任务还是由Linux操作系统完成,也就是ROS充其量是一个运行在Linux上的次级操作系统。关于ROS的介绍有一篇大牛写的很不错的文章:机器人操作系统ROS | 简介篇。
第一步,安装Linux和ROS

学习ROS首先要安装Linux,为了不抛弃原Windows操作系统,有两个选择:一个是在VMvare等虚拟机上运行,另一个是安装Windows和Linux的双系统。我的建议是电脑有足够的空间的话,最好安装双系统,这样在Linux上使用ROS时运行速度更快。虚拟机跑ROS我没尝试过,但是网上也看到有人用虚拟机学习ROS,如果电脑不好装双系统或者内存不够的话可以尝试使用虚拟机。
Linux 有不同的发行版本,目前对ROS支持最好的版本是Ubuntu 14.04 LTS (Long Term Support),对应的ROS的版本推荐为indigo,官网安装主页已更新为最新版本的Ubuntu。可以到Old Ubuntu Releases下载对应的14.04版本。Linux安装教程可以参照:Win7上安装Ubuntu14.04双系统。
需要说明的是,随着电脑的配置和操作系统的不同,安装过程大同小异,但是 有的电脑就是装不上,谷歌之后仍然无法解决问题,这时候可以尝试换台电脑或者装虚拟机,我之前用联想ideapad,折腾了一周,试了各种方法就是不成功,最后换了台华硕一下就好了。
装好Linux后可以根据这篇官方指导安装ROS: Ubuntu install of ROS Indigo。如果没有任何Linux命令行基础,那么可以先学习Linux命令行,然后再装ROS。
第二步,学习Linux命令行
对于熟悉Windows而没有接触过Linux系统的人来说,上一步安装的Ubuntu是一个很好的Linux过渡版本。在Linux中,一切任务都可以在终端(Terminal)通过命令行完成。因此非常有必要学习Linux命令行。学习Linux推荐在线编程学习环境实验楼的两门课程:Linux 基础入门(新版)和Linux命令实例练习,两门课程可以结合互补学习,也可以参见我的学习笔记:Linux命令行有一个小建议是实验楼的在线编程环境就是Linux,因此没有必要在它们的网络环境学习,而是直接用自己的终端。
同时Ubuntu 作为非商业操作系统,里面或多或少有dug,遇到问题多搜索,对于常见的问题,网上都有解决办法。我在安装完Ubuntu后就遇到一个很窘的问题:网络连接不上,但是神奇的是盖上盖子再打开后就好了,之后碰到的带耳机的时候没声音也是这样,一种解释如下:ubuntu14.04下外放有声音,耳机没声音。对于同样的遇到网络无法连接的同学可以在终端输入:
echo “options asus_nb_wmi wapf=4″| sudo tee /etc/modprobe.d/asus_nb_wmi.conf
重启即可。
第三步, 学习ROS基础
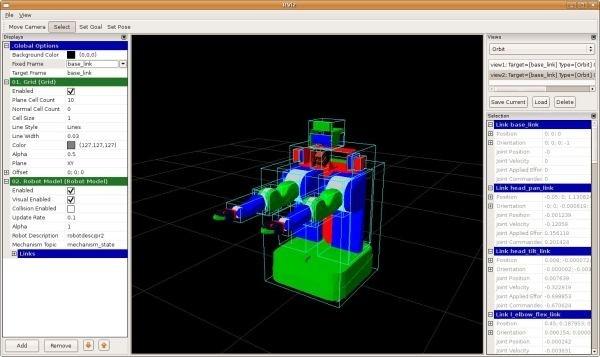
对于ROS的学习,最好的办法还是直接学习官方的Tutorial: ROS Tutorials。英语不太好的话可以看中文版的核心 ROS 教程也可以参见我的学习笔记ROS基础笔记,前期只学初级20讲即可。学习完基础20讲后可以根据兴趣或用途来学习其他教程,如上图就是实时观测工具Rviz显示机器人的URDF(Unified Robot Description Format)模型,里面还涉及坐标变换的TF相关知识,都需要学习对应的Tutorial来入门。当然,无从着手的话,这时候选择一本参考书也是很不错的,如ros by example,Learning Robotics Using Python , Learning ROS for Robotics Programming。
此外,ROS的编程语言主要是C++ 和 Python。C++是国内大多数高校的教学语言,更加深入的学习可以阅读C++ Prime 。但是我同时推荐的是学习Python,Python语言作为一种解释性语言/脚本语言,更加灵活、编程效率更高,同时有强大的库支持,因此也是现在人工智能的第一语言。如果有C/C++基础也可以很快入门,推荐廖雪峰的微博教程 Python 2.7教程,以及实验楼快速入门课程:Python快速教程 ,书的话我用的是《Python核心编程》(Core Python Programming)。
第四步,做项目

只有不断的学习和实践才能学好一门知识,学习ROS最好是一开始就挑战一个项目。在完成前三步的基础上,这时候就要根据尝试写第一个功能包(package)、第一个节点(node)了。碰到问题可以谷歌,官方问答平台ROS Q&A也很有用。同时要在实践中不断学习,因为基础20讲还远远不够,用到相关知识可以继续参见相关Tutorial。
总之,ROS的学习曲线在开始阶段很陡,需要很多预备知识,比如编程语言、Linux基础、熟练的英文阅读功底,甚至在理解ros::spin,ros::spinOnce (C++),rospy.spin (Python)的时候只有理解线程才能搞清楚这三者之间的区别。总之,有志于学习ROS的同学要有不断学习的心理准备,但是同时,ROS的熟练使用绝对是以后找工作或实现项目的一块很有力的敲门砖
转载请注明:徐自远的乱七八糟小站 » 【从安装到做项目一步步教你ROS学习入门】