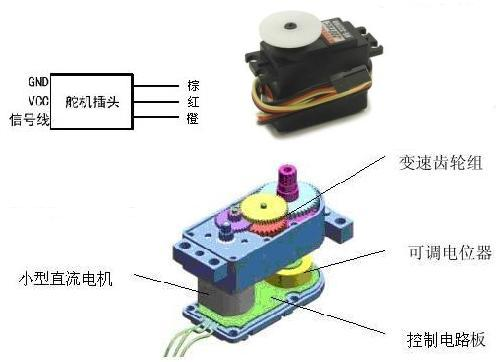
SG90 一共三根线,红线接5v电源,棕线gnd,黄线为数据控制线,该线接到GPIO上,这里使用BCM模式下的21引脚
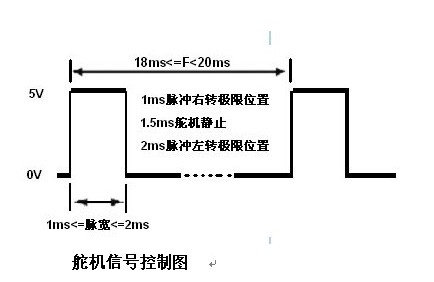
SG90 脉冲周期为20ms,脉宽0.5ms-2.5ms对应的角度-90到+90,对应的占空比为2.5%-12.5%
注意:(在规定范围内) 给多少占空比 有且只有一个角度和它对应
1.首先安装python库和gpio库
2.基于python 的编程,编写sg90.py
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 |
#!/usr/bin/env python import RPI.GPIO as GPIO import time import signal import atexit atexit.register(GPIO.cleanup) servopin=21 GPIO.setmode(GPIO.BCM) GPIO.setup(servopin,GPIO.OUT,initial=False) p=GPIO.PWM(servopin,50) p.start(0) time.sleep(2) while(True): for i in range(0,360,10): p.ChangeDutyCycle(12.5-5*i/360) time.sleep(1) for i in range(0,360,10): p.ChangeCutyCycle(7.5-5*i/360) time.sleep(1) |
注意:
1.在python 语言下
2.程序中 p.ChangeCutyCycle()是指占空比
转载请注明:徐自远的乱七八糟小站 » 树莓派使用python 控制舵机



